- Select a language for the TTS:
- UK English Female
- UK English Male
- US English Female
- US English Male
- Australian Female
- Australian Male
- Language selected: (auto detect) - EN
Play all audios:
ABSTRACT In the smart transport system, the immense growth of electric vehicles (EVs) and their charging demand is on the rise. However, the prediction of this demand has become a major
issue. An increasing electrical vehicle number will result in a decrease the greenhouse gas releases. In the EV, the battery’s capacity is limited and mileage anxiety is tedious. For the
energy conservation of electric vehicles, many studies have been applied based on this concept. The problems addressed in existing research work are high in energy conservation. To overcome
this issue, this paper proposed a model of Empirical Mode Decomposition with CNN and optimized with Seagull Optimization Algorithm (EMD-CNN-SOA). This proposed work provides an accurate
prediction of demand for energy conservation and it reduces the burden on electric grids while minimizing the cost of charging. Cognitive radio (CR) in the form of wireless communication
will revolutionize transportation through intelligent-based smart technology and it will anticipate the user needs in the aspects of detection of available bandwidths and frequencies then
seamlessly connect the infrastructure and consumer devices. It will improve the safety of mobility and adapt to the current environmental situation, informing the driver about traffic
congestion which saves energy. Cognitive radio sensors in the transportation will alert and measure the on-site real time conditions. The accuracy rate for the energy conservation in
electric vehicles of TWC, LSTM 66.13%, Deep CNN 78.91%, RNN 83.46%, and proposed work of EMD-CNN-SOA 88.23%. Similarly, for CRN the accuracy rate of LSTM is 69.16%, Deep CNN is 86.25%, RNN
is 84.37%, and the proposed work of EMD-CNN-SOA is 92.59%. SIMILAR CONTENT BEING VIEWED BY OTHERS RESEARCH ON INTELLIGENT ENERGY MANAGEMENT STRATEGIES FOR CONNECTED RANGE-EXTENDED ELECTRIC
VEHICLES BASED ON MULTI-SOURCE INFORMATION Article Open access 14 April 2025 EARLY WARNING METHOD FOR CHARGING THERMAL RUNAWAY OF ELECTRIC VEHICLE LITHIUM-ION BATTERY BASED ON CHARGING
NETWORK Article Open access 06 March 2025 DEEP REINFORCEMENT LEARNING BASED LOW ENERGY CONSUMPTION SCHEDULING APPROACH DESIGN FOR URBAN ELECTRIC LOGISTICS VEHICLE NETWORKS Article Open
access 15 March 2025 INTRODUCTION The concept behind the Cognitive radio network (CRN) is based on a wireless communication network that allocates the radio frequency spectrum to various
users. The energy efficiency of electric vehicles (EV) is by efficient coordination and communication between electric vehicles and the electric grid. This paper proposes that CRN improves
energy efficacy and contributes the energy conservation. In the aspect of energy efficiency, EV requires minimum energy to do the tasks. Similarly, for energy conservation, it changes the
technique of usage of energy. Predicting energy demand in an accurate manner constitutes the primary goal of the proposed methodology through the use of models driven by data. This allows
boosting energy management such as scheduling sessions of charging and minimizing losses. In recent days, focusing on the auto mobilization sector, electric vehicles have great potential to
overcome issues like the depletion of pollution in the atmosphere. The quick growth of electric vehicles plays a main role in the development of the power sector and economy. An energy
resource for the electric vehicle is based on electric motors which replace the inside combustion of the engine in the vehicle. These electric vehicles are charged using solar panels or
batteries or off-resources of vehicles. Most electric vehicles are based on the type of plug-in electric vehicle, on–off road EV, airborne electric vehicle etc.1. The efficient and
smart-based transportation sector can provide a green environment, improve the economy of the country, minimize road accidents, reducing traffic congestion by implementing the network of
cognitive radio (CR) signals. This CR is a wireless communication network model and it intelligently predicts traffic congestion and reduces traveling time, and is especially used in peak
hours by using radio frequency spectrum signal2. A deep learning-based model for cognitive signal in electric vehicle energy conservation is implemented by using Empirical Mode Decomposition
with CNN and optimized with Seagull Optimization Algorithm (EMD-CNN-SOA). The main aim of implementing this proposed work of EMD-CNN-SOA in the prediction of energy conservation in electric
vehicles is to minimize the cost of charging and reduce the burden on electric grids. Numerous studies have been conducted to improve EV energy efficiency. The issue in the existing
deep-learning algorithm is the inaccurate prediction of energy demand in the EV. Authors3 presented that accessing vehicular ad hoc networks (VANET) provides security and countermeasures in
the RF spectrum. Author4 proposed to save the electric energy of the EV, by detecting the accurate location of the area using VANET or cognitive radio signal. Author5 described a machine
learning-based optimized algorithm for the prediction of traffic and reducing pollution and it is used in electric vehicles based on cognitive radio signals. Liu et al.6 presented strategies
for managing the energy in hybrid-based electric vehicles and analyzing the driving conditions that enhance self-driving technology. The contribution of the proposed work is: This work
provides a more advanced and practical approach than existing VANET (Vehicular Ad hoc Networks) and electric grid systems by integrating deep learning elements with cognitive radio
technology. Handling energy constraints in an uneconomical way can be avoided by this study because the EV charging network energy forecasting and optimization are discussed. This fills the
gaps with VANET, which specializes in vehicle-to-vehicle communication to assist in traffic management. The proposed EMD-CNN-SOA model estimates demand precisely, thus relieving the power
grid quite unlike conventional power grids that can be stressed by charging erratic behavior. Moreover, through cognitive radio technology load, the communication is enhanced to be
near-real-time, fostering a fusion of load on the transmission components. Thus, with this peculiar wireless technology, vehicles and loads can be modulated based on the dynamic allocation
of bandwidth and frequency. Such techniques promote better load management and allow for cheaper, more robust, and safer transport initiatives to better society, which is a reserve for
traditional techniques. * 1. The suggested EMD-CNN-SOA model addresses the shortcomings of existing forecasting models like VANET and electric grids by significantly improving the accuracy
levels for electric vehicle energy demand forecasting. The timely, thorough prediction of charging needs helps in energy-saving solutions and minimizes pressure on the electric grids. * 2.
Emphasizing that beyond predicting energy usage, the model also forecasts the charging procedure, reducing the need to solve charging estimation issues. This invariably aids in making the
system efficient and cost-effective for users and the utility providers. * 3. This study incorporates cognitive radio (CR) technology, further enhanced by wider bandwidth and frequency
variation, thus improving wireless communication within the transportation system. This leads to intelligent transportation in that the system can evaluate conditions related to traffic, for
example, optimal routes, and suggest the best moves while saving energy and enhancing mobility safety. * 4. Through cognitive radio sensors, environmental conditions and transportation
status can be monitored automatically and instantly. This work improves EV energy demand predictions model accuracy enabling provision of required timely insights to meet energy saving and
optimal grid management goals. Complementary to this, there’s also the integration of cognitive radio technology which provides real time recognition of the transportation conditions on site
alongside the bandwidths and frequencies needed for intelligent wireless communication. This helps in energy efficiency and mobility safety by recommending the best paths as well as
adjusting the optimal paths when environmental and traffic conditions change. The suggested method changes the concept of energy management in electric vehicles and therefore improves the
efficiency, cost and environmental sustainability of the systems. The remaining part of the article is structured as follows: Section “Review of literature” presents the literature work on
prediction of energy demand in EV. Section “System setup for cognitive radio network” highlights the proposed model workflow and its efficacy. Section “Methodology of energy conservation in
E-vehicle” presents the results and proofs of the proposed model. Section “Discussion” provides the overall conclusion and future direction of the present study. REVIEW OF LITERATURE This
section presented the related work of energy demand in E-vehicle based on cognitive radio signals environment. In the past few years, the popularity of EVs has quietly increased in number,
and also various manufacturers have presented new models of electric vehicles which are hybrid-based plug-in and battery vehicles. Energy consumption of EVs fully depends on the
characteristics of the elevation of the road, speed of the EV, acceleration of the EV, and so on7. For the energy conservation of electric vehicles, non-linear signals are analysed using
deep learning, and machine learning based algorithms are used. For the development of the economy, EV is used and it uses the plug-in hybrid electric vehicle and it uses fossil fuels which
damage the green environment. Driving style is also one of the main factors of energy conservation of energy in electric vehicles and hybrid based electric vehicles. Therefore, automatic
control of electric vehicles is needed and it uses a driving style recognition (DSR) system. It saves fuel and it can be attained by aggressive drivers handling the acceleration as well as
less aggressive drivers on lowering the speed of vehicle energy consumption is varied8,9. A deep learning-based model for cognitive signal in electric vehicle energy conservation is
implemented by using Empirical Mode Decomposition with CNN and optimized with Seagull Optimization Algorithm (EMD-CNN-SOA). The main aim of implementing this proposed work of EMD-CNN-SOA in
the prediction of energy conservation in electric vehicles is to minimize the cost of charging and reduce the burden on electric grids. Numerous studies have been conducted to help EVs save
energy. The issue in the existing deep-learning algorithm is an inaccurate prediction of energy demand in the EV. Table 1 displays the review of energy demand forecasting in EVs. The
techniques in25 describe an approach that enhances spectrum distribution in cognitive radio communications by using asynchronous communication and advanced algorithms to dynamically allocate
the radio spectrum between primary and secondary users. The aim is to improve the process of communication systems and make more effective utilization of limited spectrum resources. The
article26 refers to an approach that aims to improve how the available radio spectrum is shared between primary and secondary users, utilizing techniques such as asynchronous communication
and advanced algorithms to dynamically allocate the spectrum. This approach aims to expand the overall communication performance of the system and make restricted spectrum resources more
efficient. The development of deep learning algorithms27 for controlling the transmission power in massive MIMO (Multiple-Input Multiple-Output) cognitive radio networks in an
energy-efficient manner. The objective is to optimize the energy consumption28 of the communication system to maintaining the considerable level of communication performance. the study of
efficiency of cognitive communication29 and how future wireless communication integrates with cognitive spectrum is deeply discussed30. The paper20 that analyzes the problem of communication
outage in cognitive electric vehicle networks that use a combination of visible light communication (VLC) channels and radio frequency (RF). The study takes into account the effects of
signal-dependent noise and imperfect channel state information (CSI) on the performance of the communication system. The scheme31 aims to provide both security and efficiency in the
communication between vehicles, by utilizing advanced techniques to protect the communication from unauthorized access or manipulation and to improve the use of available communication
resources. The goal is to enable secure and efficient communication in large-scale IoV networks. The article32 focused on improving the energy efficiency of communication in indoor-flying
networks that use next-generation wireless technology (B5G/6G) and multiple-input multiple-output (MIMO) technology. It aims to develop power control algorithms to dynamically allocate the
available communication resources to optimize the energy consumption of the communication system to maintain a considerable level of communication performance. The paper33 enables
energy-efficient communication in indoor-flying networks that utilize MIMO-based cognitive technology in 5 g/6 g networks. RESEARCH GAP OF EXISTING WORKS AND PROBLEM FORMULATION The real
issue of anticipating total energy requirements for smart transportation systems is still untouched, as the previous efforts have simply concentrated on reducing the driver’s range anxiety
using generating instant energy estimates. In the works done so far, there has been a use of CNN for energy prediction, but there is no interfacing with intelligent wireless systems such as
a cognitive radio that can adjust and respond to the changing traffic of a grid in real time. The previous studies only emphasized on the estimation of energy consumption and did not include
energy saving measures or charging cost minimization. In previous works do not work on the goal of mitigation of electric load on the grids and minimization of environmental issues through
anticipative energy needs. Charging networks affect the functionality of EVs which in its turn causes automakers to design EV specific to their preferred charging networks, to lower the
downtime and optimize the performance. Vehicle displacement on the lanes by a driver is done when a series of inputs consisting of the vehicle’s current inputs like lane lines, vehicle
ahead, and inputs previewed like anticipated curved or pre merging traffic34,35. This is important when considering how the future energy systems will look, especially when microgrids become
more common tools for renewable energy integration and focused energy supply36,37. This strategy is regarded as a general technique of traffic control and improvement of urban transport,
with the view of more optimal use of visual data and feedback in transportation systems38,39. This review highlights the benefits of applying image-based semantic comprehension to ITSs, as a
means of facilitating efficient and secure transportation systems using automated sophisticated analysis of traffic scenes40. The previous works were limited to only the variations of CNN
and did not attempt to utilize any optimization algorithms like the proposed Seagull Optimization Algorithm for enhanced performance. The previous works were problems of communication which
did not allow a user to interact actively and dynamically as well as in real time with the changing circumstances. Works like24 does not consider human–vehicle and vehicle–vehicle
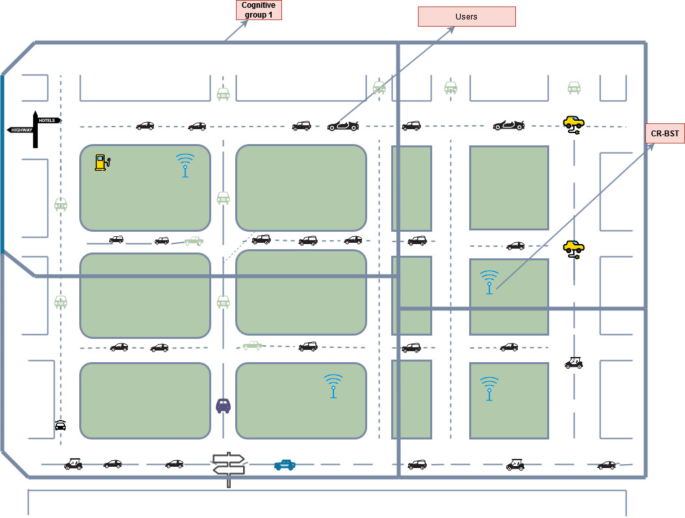
communication effectively. They focus only on using spectrum effectively. SYSTEM SETUP FOR COGNITIVE RADIO NETWORK COGNITIVE COMMUNICATION SYSTEM SETUP The cognitive radio (CR) assisted
electrical vehicular network (EVN) is defined the below network scenario Fig. 1. The vehicular networks are divided into small cognitive cells (SCC) called cognitive groups in which each
cell has its own base station. In each SCC there are N number of the secondary users in the vehicular clusters. The primary users (PU) are those who have licensed access in the CR network.
If any vehicles in the network has more traffic congestion, then this is the first vehicle to share the data across CRN. To transfer the data, the available bandwidth is divided among the
various SCC in Bc numbers of orthogonal channels. The CR-BS, responsible for managing a specific channel41, efficiently allocates the spectral resources by collecting data from CRV-SUs. In
order to avoid disrupting transmissions from the primary users (Pus), the CR-BS carefully manages the available resources. The system formation has four phases for using effective cognitive
radio based data transmission. 1. cluster mobility of vehicles, 2. Primay user’s role 3. Packet Arrival process and 4. Interference constraints. The detail descriptions on the above process
are given in following sections. CLUSTER MOBILITY OF VEHICLES Consider there are totally N number of secondary users in the cognitive radio vehicle network. The total amount of time that SU
has existed in the N at a certain cluster is the mean duration of SU cluster formation41. These SU are exponentially distributed in the clusters. it should be noted that SU in particular
cluster group must maintain its membership in its cluster group. Consequently, the mobility of SU cluster formation is depicted through a transition rate matrix, which signifies the speed at
which clusters are created and transformed. The matrix MT is given by, $$MT = \left[ {\begin{array}{*{20}c} {mt\left( {1,1} \right)} & \cdots & {mt\left( {1,T_{m} } \right)} \\
\vdots & \ddots & \vdots \\ {mt\left( {T_{m} ,1} \right)} & \cdots & {mt\left( {T_{m} ,T_{m} } \right)} \\ \end{array} } \right]$$ (1) where \(T_{m}\) = |ƕ| represents
locations totally presents in that service area and |ƕ| defined as cardinality of the set. The element \(mt\left( {l,l{^{\prime}}} \right)\) indicate the location ‘\(l\)’ changes to
“\(l{^{\prime}}\)”. Here SU speed can be captures in various locations of cluster using matrix Eq. 1. we use Steady state probability which refers to the long-term behaviour of a system over
time, where the probability sharing of a state remains the same. The stable state probabilities are calculated by finding a vector of probabilities that satisfies the balance equations,
which relate the possibility of changing from one condition to another. Algorithm EMD-CNN-SOA stands out from other algorithms because of its combination of advanced signal decomposition,
audio feature robust extraction, dynamic optimization and inclusion of cognitive radio. These characteristics specifically assist it to be better than the conventional approaches in terms of
accuracy, efficiency and even adaptability hence makes it particularly ideal for forecasting energy evolution in the case of an electric vehicle networks. PRIMARY USERS PROCESS The
transmission of packets from SU cluster members (CLM) to cluster heads (CLH) and cluster heads to their respective destinations relies on a shared channel with licensed users. This shared
channel can cause many problems to primary licensed users. To overcome the interferences in common channel, CLM and CLH will continuously monitor the authorized users activity in the shared
channel41. This process makes primary users to access channels and transmit data without interferences. The two state Markov chain model is used to represent the primary users activity in
the shared channel. A mathematical model known as a dual-state Markov chain is used to illustrate where a system behaves when its next state is only dependent on its current state and not on
its past states. The dual-state Markov chain is a type of Markov chain where there are only two possible states, such as an “on” state and an “off” state. In a dual-state Markov chain, the
behavior of the system is modeled using a transition probability matrix, which indicates the possibility that a state will change. The possibilities of changing from one state to another
during a predetermined amount of time are specified by the square matrix known as the transition probability matrix. The two-state Markov chain is helps to model the behavior of a
communication channel, where the “on” state denotes the active state, whereas “off” state denotes the inactive state. The equation for markov chain with two state is as follows: $$S_{c} =
\left[ {\begin{array}{*{20}c} {S_{c} \left( {0,0} \right)} & {S_{c} \left( {0,1} \right)} \\ {S_{c} \left( {1,0} \right)} & {S_{c} \left( {1,1} \right)} \\ \end{array} } \right]$$
(2) where state transition (S) of common channel \(S_{c}\) represents first row as idle and second row as busy in above equation. PACKETS COMMUNICATION The number of packets is equal to
queue size of the cognitive group. Each packets are processed by SU-CLM to keep in buffer. Then the SU-CLM fetch the buffered packets and transmits to the CLH . The packet communication is
processed using the batch markovian process as given Eq. 3. The probability of packets transmission is denoted using transition probability matrix \(PT_{A}\) where as ‘A’ belongs to packets
arrival A \(\in\) {0,1,2,…. \(A_{max}\)}. the value \(A_{max}\) represents maximum value of packets. $$PT_{A} = \left( {\begin{array}{*{20}c} {PT_{A} \left( {0,0} \right)} & \cdots &
{PT_{A} \left( {1,Y} \right)} \\ \vdots & \vdots & \vdots \\ {PT_{A} \left( {Y,1} \right)} & \cdots & {PT_{A} \left( {Y,Y} \right)} \\ \end{array} } \right)$$ (3) In above
equation \(PT_{A} \left( {x1,x2} \right)\) represents probability of maximum (max) data packets arrived at queue with changing × 1 phase to × 2. Transition probability matrix PT is PT = PT0
+ PT1 + … + PTA(MAX). Further steady state probability vector is represented by \(\vec{\omega }\) ,then the arrival rate of packet is calculated using equation $$\overline{\tau } = \mathop
\sum \limits_{A = 1}^{A = max} A(\vec{\omega }^{t} PT_{A} )1.$$ (4) INTERFERENCE LIMITATIONS The cognitive radio model for this work must control interferences that occur during data
communication from primary user transmission. In this network, secondary users identify the available spectrum for transmitting their data. While using the available spectrum, there must not
be any interferences toward the primary licensed user41. This authorized user is the owner of the spectrum band. Therefore, the administration must guarantee zero interference for the
primary users. Secondary users must strictly follow cognitive capabilities, including accurately detecting available spectrum holes to determine if the channel is in use by a licensed owner.
If a spectrum hole is found, the secondary users should adjust their radio parameters efficiently to utilize the hole without disrupting primary user transmissions. In this research, we
allocate each communication channel to one secondary intelligent network user at a time. To ensure the quality of communication for a single user, signal interferences and noise ratio need
to be within its threshold limit. The power allocation to the ‘n th’ secondary user using ‘r th’ subcarrier is termed as \(P_{nr}\). The channel allocation to the ‘n th’ secondary user using
‘r th’ subcarrier is termed as \({ }C_{nr}\). Then the threshold value is set as $$\delta_{n}^{min} \le {\mathbb{O}}\frac{{\left[ {\mathop \sum \nolimits_{r = 1}^{NC} { }C_{nr} .P_{nr}
\left| {h_{nr} } \right|^{2} } \right]}}{{\sigma_{x}^{2} }}{ }$$ (5) where subcarrier r = 1,2,3…NC, \({\mathbb{O}}\) is represented as operator of expected value, \(h_{mn}\) is denoted as
carrier gain nth SU. \(\sigma_{x}^{2} = v\left( {\frac{ND}{{NC}}} \right)\) where ‘ND’ is represented as noise density. METHODOLOGY OF ENERGY CONSERVATION IN E-VEHICLE Energy conservation of
E-vehicle is based on the traffic congestion, status of the electric vehicle’s condition42. Energy reduction is done by implementing a deep learning model43 with optimization of the
algorithm of EMD-SOA. The framework of the accurate prediction of energy conservation of electric vehicles is highlighted in Fig. 1. In Fig. 1, battery aging signal as well as driving signal
is collected from various e-vehicle using GPS/GPRS and it tracks the information. For the accurate prediction of energy consumption these raw input signals are applied to EMD-CNN-SOA.
E-VEHICLE DATASET DESCRIPTION The prediction of energy demand of the electric vehicle is based on its driving cycles, condition of the vehicle and traffic congestion. E-vehicle is of various
types like trucks which are used for delivery of goods, for transportation purposes of people etc. Data collected and implemented for this work is from44. The acceleration of the vehicle
ranges from 2.1 to 22.4/s. The efficiency of the wheel ranges from 104 to 273/km. it depends upon the e-vehicle. The maximum power of the battery is 940 KmH and it is for a Tesla E-vehicle.
In addition to that GPS related data uses cognitive radio signal acquired the data of energy conservation of vehicle, rotational speed as well as traffic congestion etc. Apart from that, GPS
acquired the data like vehicle ID, velocity of vehicle, timestamps etc.45. It also determines the time interval of an E-vehicle between starting place to destination place. The data set
consists of signals of several electric vehicles (EVs), such as the following: * Battery degradation signals. * Driving signals (Report of driving maneuver such as acceleration or the
vehicle speed). * GPS/GPRS data (For instance vehicle speed, time of day, and the amount of traffic). Moreover, energy consumption figures as well as additional parameters such as road grade
and traffic volume that are determinants of energy consumption are also included in the dataset. Key features are shown in the Table 2. DATA PREPROCESSING We put a lot into the
preprocessing steps to prepare our data with high optimal. There was a lot of work needed on the dataset as there were many columns with missing values. Some of them were crucial because
they represented consumption of energy, so for time series data (like GPS signals) we used linear interpolation, while numeric features such as battery or wheel efficiency were imputed by
means or median values. If there are any missing categorical parts, these are filled with the value that is occurring the most. Meanwhile, all feature imputation has been carefully done
based on domain-specific requirements, which included removing outliers in speed and acceleration via the use of Z score normalization. Feature Engineering involved creating features like
‘energy consumption per km’, ‘rolling averages’ for speed and acceleration to add comprehensiveness to the model. Furthermore, to facilitate the convergence of the model during training,
speed, battery power, and acceleration features were all scaled to a 0–1 range. Moreover, to extend the dataset and replicate realistic driving scenarios more faithfully, Data Augmentation
strategies such as noise addition and oscillation of the road height were employed. With these measures, the data ready to be used was reliable and accurate with good representation for the
training of the predicting model. Data imbalances are handled, for instance, in the case there are more low-speed driving data points than high-speed driving ones then the learning policy
must change as follows. Oversampling of data handled using SMOTE. The SMOTE (Synthetic Minority Oversampling Technique) was indicated in the situations where the driving conditions were
underrepresented type. Weight Adjustments are done using loss function. The importance of loss function terms that correspond to the underrepresented conditions were enhanced. ENERGY
CONSERVATION USING EMD-CNN-SOA (PROPOSED) Proposed work of EMD-CNN-SOA is a combined version for the prediction of energy conservation in EVs. It predicts the demand of charging for
vehicles. Energy conservation of electric vehicles depends upon various parametric factors like the elevation of road, acceleration, speed of the vehicle etc. These parametric factors are
non-linear. For the accurate prediction of energy conservation of EV, these non-linear form factors are implemented by EMD-CNN-SOA. In the proposed model, decompose the raw input signal data
into a sub series of intrinsic mode functions. These sub-series of data are passed into the CNN model for the identification of energy conservation of EV46. To reduce the rate of the error
and loss function in the CNN by applying the Seagull Optimization algorithm. (SOA). EMPIRICAL MODE DECOMPOSITION (EMD) In the E-vehicle prediction of energy conservation based on time
series, EMD decomposes the time series into various sub-series. Reconstruct the various sub-series of decomposing signal data to obtain the prediction of energy demand value. The charging
energy signal of original data of electric vehicle is defined as: $$os\left( t \right) = \mathop \sum \limits_{i = 1}^{n} in_{i} \left( t \right) + dr_{n} \left( t \right)$$ (6) Here,
\(in_{i} \left( t \right)\) represents the intrinsic mode functions (IMF) of different decompositions of original energy signal data. \(dr_{n} \left( t \right)\) denotes that, after
implementation of number of IMF it derives the residue signal of data. For executing EMD, based on particular IMF which satisfies the extreme and zero crossing which should be equal or
different by one and its average value of envelop is represented by local minima and maxima must be ‘0’. The steps involved for implementing EMD in electric vehicle conservation of energy
charging based on time interval is given below: STEP 1: Read the original energy signal value of electric vehicle. STEP 2: Detect the positive and negative peaks of original energy signal
and generate the lower envelope \(slower\left( t \right)\) by connecting the local minima with cubic spline and for upper envelope \(supper\left( t \right)\) by connecting the local maxima
of original energy signal value based on the time series of \(os\left( t \right)\) with cubic spline. STEP 3: Calculate the mean value \(m\left( t \right)\) of lower envelope and upper
envelope from Step 2. $$m\left( t \right) = \frac{supper\left( t \right) + slower\left( t \right)}{2}$$ (7) STEP 4: Extract the data signal from original energy signal value and mean signal
value based on time series using: $$Q\left( t \right) = os\left( t \right) - m\left( t \right)$$ STEP 5: To get the first intrinsic mode function (1-IMF) subtract the mean from its original
energy signal value. It is evaluated by setting \(P\left( t \right) = Q\left( t \right)\) and also replacing the \(os\left( t \right)\) with residual value in Step 7. STEP 6: If \(Q\left( t
\right)\) is not IMF then set replace \(os\left( t \right)\) with \(Q\left( t \right)\). STEP 7: For evaluate the first residual component by subtracting 1-IMF from its original energy
signal value. It is evaluated as: $$r\left( t \right) = os\left( t \right) - p\left( t \right)$$ (8) STEP 8: Calculate the next IMF by considering the residual component and do the same
process from Steps 1 to 6 and it is defined as: $$\mathop \sum \limits_{t = 1}^{m} \frac{{(Q_{l - 1} \left( t \right) - Q_{l} \left( t \right))^{2} }}{{(Q_{l - 1} \left( t \right))^{2} }}
\le \mu \left( {l = 1,2, \ldots n and t = 1,2, \ldots m} \right)$$ (9) Here \(m\) denotes the length of the signal and \(l\) is the iterations, \(\mu\) is the stopping parameter from 02 to
0.3. Figure 2 shows that workflow diagram. EMD is effective for the decomposition of EV energy signals during normal operations and is always subject to all types of nonlinearity and
nonstationary growth trends. This is due to the influence road conditions, driver behavior, and vehicle dynamics have on an EV energy signal. It is also worth noting that EMD does not
require any predefined structure to the signal in the form of basis functions, operators, or assumptions, unlike Fourier Transform or Wavelet Transform-based decomposition methods. The
primary goal of EMD is to provide decompositions of the original data into Intrinsic Mode Functions (IMFs) so that such data are oscillatory. However, linkages among them are based on a
specific time scale. Because of this type of construction, the model can extract specific components of the energy signal: * High-frequency events like sudden acceleration or break events *
Low-frequency events, modulation, or phase shifts in the everyday driving of an EV, degradation of a battery over a long period By separating the energy signals into IMFs and a residue, the
energy signal can be deduced to have noise and irrelevant components. This makes it possible for EMD to capture meaningful patterns that can improve the quality of the signal. Finally, this
pre-step simplification prepares the signal for a Convolutional Neural Network (CNN) and narrows down the most needed levels of the data to be focused on. The graph of EV energy consumption
is a time series. The EMD significantly improves the analysis of such data since it does not need the input to be stationary or the frequency bands to be predefined. Figure 3 shows that the
usage of EMD in the electric vehicle (EV) is used is used to analyze the power consumption. EMD decomposes the power consumption signal into intrinsic mode functions (IMF) and it identified
the features which are relevant for the energy conservation. The signals are non-stationary which are decomposed into IMFs effectively. Basically, usage of EMD in the analysis of electric
vehicle is to produce the energy conservation. Figure 4 illustrates the original energy signal is a mixed signal consisting of a number of frequency components and noise. IMF 1 contains the
high frequency part of the signal which changes rapidly over time. The lower IMF 2 lies above the lower frequency component which is a gradual change. Finally, the residue represents rest of
the noise or unstructured material that remains after the extraction of major frequency components. This decomposition is quite similar to EMD decomposition logic and indeed aids in
developing data feature extraction and data analysis that facilitates a required specific feature or a trend to be identified. Such techniques, when integrated into the model for research
purposes, are very useful to enable one accurately predict the energy consumption in electric vehicles where the nature of the signals is quite important in the improved performance of the
model. CONVOLUTIONAL NEURAL NETWORK (CNN) After applying the EMD it decomposes the raw input signal data into IMF and its channel of IMF is passes as input in CNN. Traditionally,
convolutional neural networks consist the layers of input, conv layer, ReLU layer, Max pool layer, FC layer and output layer47. Kernels in the convolution layer decompose IMF input data
signals that are passed through the convolutional layer. Decomposed data signals in the convolutional layer and its weights are optimized by using the Seagull optimization algorithm. The
parameters in the convolutional layer were mapped using the ReLU layer in the search agent of the search space. Using the pooling layer, the dimension of feature mapping is reduced. Nodes in
the FC layer is connected to every node in the preceding layer. The output layer helps for the prediction of energy demand in the network by using the softmax function. The framework of CNN
is displayed in Fig. 5 In Fig. 5, CNN is used in the identification of the energy demand of EV network model. In the conv layer, the original input signal is processed by the kernel in the
convolutional layer to produce the output and it is expressed by: $$p_{i}^{ly} = f\left( {\mathop \sum \limits_{i = n}^{k} p_{i}^{ly - 1} wt_{i}^{ly} + \theta_{i}^{ly} } \right); \left( {i =
1,2, \ldots m;0 < n \le k \le m} \right)$$ (10) Here \(f\left( J \right) = \frac{1}{{1 + e^{ - ly} }} , J = \mathop \sum \limits_{i = n}^{k} p_{i}^{ly - 1} wt_{i}^{l} + bia_{i}^{ly}
\left( {i = 1,2, \ldots m;0 < n \le k \le m} \right)\), \(p_{i}^{ly}\) and \(p_{i}^{ly - 1}\) are represented that output in layer \(ly\) and input in layer \(ly - 1\). \(wt_{i}^{ly}\) is
the weight and \(\theta_{i}^{ly}\) is the bias value. The sub sampling of input process signal can be defined as: $$p_{i}^{ly} = g\left( {p_{i}^{ly - 1} } \right) + \theta_{i}^{ly}$$ (11)
Equation (6) defined by function which selects the maximum value. In the fully connected layer can be expressed by: $$p^{ly} = f\left( {J^{ly} } \right), J^{ly} = wt_{i}^{ly} p_{i}^{ly - 1}
+ \theta^{ly}$$ (12) Here, \(wt_{i}\) is the weight value from the layer \(ly - 1\) to layer \(ly\) and \(p^{ly}\) denotes the output data. In the above calculation part of CNN has various
kernels in the convolutional layer which corresponds to various outputs and the weight value of all convolutional kernels is the same. The outputs from various convolutional kernels are
combined together and transferred to the subsampling layer. The output of conv layer is transferred into input of the next layer. In the pooling layer, it reduces the dimensionality of data.
The final output of the prediction of the demand of energy in the electric vehicle is derived from the fully connected layer. The CNN algorithm is used for increase the accuracy rate in the
prediction of the energy demand of electric vehicle. Table 3 shows the hyperparameter values of CNN. Batch size is set to 32, which means the model takes in 32 samples at a go while
training. This value is quite standard as it does not exhaust resources and allows for reasonably fast training. Epochs set to 50, meaning the model will step through the entirety of the
dataset 50 times while training. This is sufficient for many tasks as the model learns well, but does not fit too much. Learning rate is 0.001 with decay simply implies, that the initial
value of 0.001 is used, but while training decreases over time. A lower bound learning rate take care of optimal parameters drafting. Adam was selected due to its popularity in incorporating
momentum into learning and sophisticated adaptive rates, which is tremendous for the prediction of energies in EVs, considering such problems are non-linear and complicated in nature. Best
known for robust performance and faster convergence. Set at 0.5, by which 50% of neurons are randomly selected to be disregarded during training to minimize overfitting. This requires the
model to capture very specific features and thus aid in improving generalization. Conv2D Filters Layer 1 & 2 is the primary layer in the model incorporates a convolution with 32 filters
and the secondary layer utilizes 64 filters in order to capture complex details from the input data. More filters lead to more complex models as it assists more in capturing complexities in
the data. Kernel Size (Conv2D) is the height and width of the filters are defined with (3, 3) which means that the filters are 3 × 3 pixels large. This is a standard dimension for
identifying local elements like edges and textures in an image or other similar signals. Pooling Size (MaxPooling) is (2, 2) refers to 2 × 2 downsampling of the feature maps and uses spatial
pooling to best retain key feature information at the same time lowering the overall volume of computations needed. Along with that, it also improves efficiency. Activation Function (Hidden
Layers) is mentioned very often in this paper, the hidden layers ReLU functions are used because they are powerful in allowing the model to learn non-linear functions while transcending the
vanishing gradient problem. It leads to a faster training time by allowing a comparison in integer maps. Activation Function (Output Layer) is based on the task being completed, either the
Sigmoid or Linear activation function can be used. If the task is of binary classification by predicting the energy demand as low or high with sigmoid is the preferred choice. If the task is
a regression problem, a larger variety of output values can be predicted, thus linear is preferred. The selected hyperparameters and configurations guarantee that the model EMD-CNN-SOA can
effectively learn relevant characteristics from intricate time series data, such as EV energy consumption, and accurately forecast energy demand using sophisticated training methods that
include the Adam optimizer and dropout. The configurational design (with the addition of filters and sequential pooling layers) allows the model to be trained at different levels of detail,
for feature extraction and processes characterization. SEAGULL OPTIMIZATION ALGORITHM (SOA) Seagull optimization is a metaheuristic algorithm which is inspired by the behaviour of seagulls.
It is applied in energy conservation of EV with cognitive radio networks. To minimize the energy consumptions and produce high efficiency in charging by implementing the optimization of
seagull algorithm. It is also used in optimization of communication strategies in cognitive radio networks which minimizes the interference and improvising the overall performance. SOA
continuously monitoring the usage of energy of EV in the cognitive radio network (CRN). SOA adjust the speed of EV and analysis the minimum usage of energy from battery. The Seagull
Optimization Algorithm (SOA) is applied for optimizing the weights of a Convolutional Neural Network (CNN), thereby improving electric vehicles energy consumption prediction accuracy.
Specifically, its goal is the minimization of the prediction error through modification of the CNN parameters with emphasis on loss reduction. Moreover, SOA helps to reduce the time required
for convergence, thus allowing the CNN to find the correct or nearly correct solutions within a shorter time span. Thus, alongside the establishment of SOA, the optimization procedure is
enhanced with better performance in energy demand forecasting. Behaviour of seagull optimization algorithm is migration and attack. Migration behaviors of seagull are getting food and
Attacking behaviour is defined as actions taken by seagulls against migratory birds while they are at sea. In the migration phase, SOA simulates that movement of seagulls from one site to
another. That is, it continuously monitoring the movement of electric vehicle and analysis the usage of energy in CRN. At this stage, seagull collisions may occur. Avoiding collisions in
congested areas is a traffic management strategy. To avoid collisions between the seagull with its neighbour seagull, a variable \(P\) is included for determining the new search position of
the agent. It is defined by, $$C^{*} = P \times Pop^{*}_{s} \left( {iter} \right)$$ (13) Here, \(C^{*}\) is the search agent’s location and it avoids running into other search agents.,
\(Pop^{*}_{s} \left( {iter} \right)\) is the existing position of search agent, \(iter\) is the iteration times and \(P\) denotes the behaviour of search agent in the given search space and
it is evaluated by: $$P = fre_{P} - \left( {iter \times \left( {\frac{{fre_{p} }}{{max_{iter} }}} \right)} \right)$$ (14) Here \(er = 0,1,2, \ldots ., max_{iter}\), \(fre_{p}\) is frequency
variable of \(P\) and which is linearly minimized. That is \(fre_{p} = 0\). In this work, \(fre_{p} = 2.\) After implementing the collision avoidance between the seagulls, the search agent
moves towards the best neighbour seagull. $$M_{s}^{*} = R \times \left( {PS_{bs}^{*} \left( {iter} \right) - L^{*} \left( {iter} \right)} \right)$$ (15) Here, \(M_{s}^{*}\) is the position
of search agent of \(L^{*} \left( {iter} \right)\) towards the best fit of seagull based on fitness value. The randomized variable \(R\) is responsible for managing the stability between
investigation (migration) and manipulation (attacking). The value of \(R\) is evaluated as: $$R = 2 \times P^{2} \times rnd$$ (16) Here \(rnd\) is a random number that lies between the range
of 0 and 1. Finally, update its position of the best search agent in the search space. $$D_{s}^{*} = \left| {C^{*} + N_{s}^{*} } \right|$$ (17) Here \(D_{s}^{*}\) denotes the distance
between the search agent in the search space and the best-fit search agent whose fitness value is less. For the attacking prey phase, seagulls attack the prey in the movement of air in a
spiral motion behaviour. The behavior of a seagull is defined by \(x,y,z\) planes which are represented as follows: $$x^{\prime} = rad \times {\text{cos}}\left( l \right)$$ (18) $$y^{\prime}
= rad \times {\text{sin}}\left( l \right)$$ (19) $$z^{\prime} = rad \times l$$ (20) $$rad = a \times e^{lb}$$ (21) Here, \(rad\) is the spiral motion radius and \(l\) is in the range of
[\(0,2\pi ] randomly.a,b\) are constant value for defining the spiral motion in air and \(e\) is the logarithm. The efficient position of the search agent is evaluated by using Equations
from (17) to (21). $$L^{*} \left( {iter} \right) = \left( {D_{s}^{*} \times x^{\prime} \times y^{\prime} \times z^{\prime}} \right) + PS_{bs}^{*} \left( {iter} \right)$$ (22) Here \(L^{*}
\left( {iter} \right)\) stores the best outcome and updates its position of search agents in the search space. The pseudocode for SOA is given below: The candidates are first encoded by
providing the set of weights of the encoder CNN. Each candidate solution can be viewed as a set of weights and biases of the encoder CNN. In Migration Phase candidate solutions are still
looking for the encoders’ configuration forming the search space. The solutions positions are modified by applying mathematical models of seagulls’ Adam’s breakfast whereabouts to widen the
scope for seagulls migration. During the attack phase, When a specific area in the search space is determined to be optimal, the solutions begin to apply the strategy and techniques for that
specific space. To concentrate the search on the desired areas, specific spiral motion equations are used to converge the encoder weights. At every iteration, the algorithm calculates the
so-called ‘fitness’ of each candidate solution that has gone through the encoder coffin of the CNN algorithm for a certain task of regression—for instance, the MSE. The best one (the weight
set) is taken for the next iteration. The procedure continues until either the maximum defined number of repetitions is attained or the loss function computed reaches an acceptable value.
SOA optimization helps to adjust the weights of CNN for minimizing the loss function. Figure 6 shows the integration of CRN and EV model. CONVOLUTIONAL NEURAL NETWORK (CNN) In the proposed
study of EMD-CNN-SOA based on the cognitive radio signal, the input raw charging signal of an electric vehicle is applied in EMD and it is separated into a sub-series of data as intrinsic
mode functions (IMF). This proposed work provides an accurate prediction of demand for energy conservation and it reduces the burden on electric grids by minimizing the cost of charging.
Cognitive Radio (CR) signal is used for the reduction of traffic congestion, to minimize road accidents. It predicts the energy conservation of electric vehicles. CNN-SOA based weight
optimization shown in Fig. 7. RESULT ANALYSIS We perform a set of experiments with real time data collected from electric vehicles, like energy usage, battery performance, car speed, and
additional driving parameters like level of congestion and road inclination captured with GPS/GPRS. The simulation is meant to measure the performance of EMD-CNN-SOA model which has been
optimized with SOA in comparison to other optimization techniques such as Gradient Descent (GD) or Adam. Electric vehicles—EVs—are accessed in real-time from various sources. Particularly
concerning the battery sensors, data captures its voltage, temperature, charge cycles, battery degradation, and more. Vehicle control units capture, energy consumption per km, acceleration,
or braking efficiency of the motor. A GPS/GPRS module enables tracking of real-time locations, timestamps, traffic conditions, as well as elevations of the roads. Data regarding temperature,
moisture, and other climate conditions that can affect the performance of a battery, is drawn through a Weather API. Sensor data is live streamed on a platform utilizing cognitive data
transmission for real-time based analytics in the cloud. Cognitive setup was detailed in Section “Cognitive communication system setup”. Table 4 has devices used to collect the details.
OBD-2-scanner used to retrieve parameters from vehicles. GPS and AWS cloud setup has been made for real time data processing. The proposed work of EMD-CNN-SOA in the cognitive radio
environment for the identification of energy conservation in EV based on time series. The empirical mode decomposition (EMD) is applied and extracts the IMF, now the individual channel of
IMF is applied as input to CNN. To improve the weight of CNN by implementing a seagull optimization algorithm. This proposed work is carried out in Python. In training the CNN model, kernels
of each convolutional layer were initialized with random numbers and trained for a maximum of 2500 epochs using the learning rate of 0.01 and its batch size of 64. To get the constant
evaluation rate, gradually decrease the learning rate. Python is used to simulate the prediction accuracy of the model. CPU, GPU, and standard OS are used in the system. The data set was
divided as Training Set (70%) was the primary purpose of the model training process. Validation Set (15%) was Hyperparameter tuning was achieved by its use, to avoid overfitting. Testing Set
(15%) has been Set aside for final evaluation. To keep the temporal relations intact, the splitting of time-series data was done using chronological order. K-Fold Cross-Validation has been
applied while training to ensure that the model was capable of generalization over the various data subdivisions. The parametric measures used in this work are MAE, MSE, RMSE, and accuracy.
It is compared with traditional wireless communication (TWC) and cognitive radio networks (CRN). Using CRN it can easily adapt the environmental changes and it dynamically switches to
various frequency bands, modulation schemes, transmit power, and channel access in the available spectrum. But TWC is a fixed one and it can be implemented based on a specific frequency band
along with its modulation. It cannot adapt to environmental changes of various spectrums. Therefore, using CRN improves efficiency and reduces energy consumption. MAE $$MAE =
\frac{1}{M}\left| {\mathop \sum \limits_{i = 1}^{M} Q_{act} - Q_{est} } \right|$$ (23) \(Q_{act}\) is the actual energy consumption, \(Q_{est}\) is the assessed energy consumption and \(M\)
is the total number of instances. MSE The average of the squares representing the variations between the expected and actual values is determined by the mean squared error, or MSE. $$MSE =
\frac{1}{M}\mathop \sum \limits_{i = 1}^{M} \left( {Q_{act} - Q_{est} } \right)^{2}$$ (24) RMSE It is comparable to the MSE, except the MSE root is used to compute it. $$RMSE = \sqrt
{\frac{1}{M}\mathop \sum \limits_{i = 1}^{M} \left( {Q_{act} - Q_{est} } \right)^{2} }$$ (25) ACCURACY IN PREDICTION $$acc = \frac{1}{M}\mathop \sum \limits_{i = 1}^{M} Q_{y}$$ $$Q_{y} =
\left\{ {\begin{array}{*{20}c} {1 if \left( {Q_{act + 1} - Q_{est} } \right)\left( {Q_{act + 1} - Q_{est} } \right) > 0 } \\ {0, Otherwise} \\ \end{array} } \right.$$ (26) Here, \(M\)
represents that total number of sample data, \(Q_{act}\) is the original raw input data signal of electric vehicle. \(Q_{est}\) is the predicted output of demand energy for charging. This
proposed work is compared with LSTM48, Deep-CNN49, RNN50. Figure 5 shows that Daily aggregated basis of Energy Requirement in EV. In Fig. 8, Monte Carlo simulation results of three forms of
electric vehicle scenarios. That is, the Current day scenario, medium scenario, and high scenario respectively. In the High scenario, the electric vehicle’s energy demand slightly increases
compared to current day demand. The high scenario maximum peaks range from 245 to 350 KW. In the current day scenario, a medium-fixed energy requirement ranges from 160 to 295 KW. The
high-fixed energy requirement ranges from 390 to 485 KW and so on. The average daily requirement of energy of electric vehicles is 120–225 KW. The medium average requirement of energy in EV
is 175–286 KW and The high average requirement of energy in EV is 225 KW to 375 KW. Figure 8a shows the Original raw input non-linear form of data. Figure 8b shows decomposition of raw input
signal data using EMD. Figure 9a and b show that the original raw input energy signal data is decomposed into a sub-series of data of electric vehicles using Empirical Mode Decomposition
(EMD). It decomposes the IMF as an output signal. This output is carried into the input of CNN model for the prediction demand of energy in the electronic vehicle. Table 4 shows a comparison
of various algorithms in the aspects of parametric measures of MAE, MSE, and RMSE in traditional wireless communication (TWC). In the observation of Table 5, various algorithms of LSTM,
Deep-CNN, and RNN are compared with various error parametric measures. Our proposed work of EMD-CNN-SOA produces the lowest error rate compared to other algorithms for the energy demand in
electric vehicles. Proposed work of EMD-CNN-SOA, the error rate of MAE was 0.0642, MSE was 0.1531 and RMSE was 0.103. Table 6 illustrates various algorithm comparisons in the aspects of
parametric measures of MAE, MSE, and RMSE in cognitive radio networks (CRN). For weight optimization, SOA is an important technique for improving the performance of machine-learning
algorithms through efficient updating of weights on parameters of neural networks or other algorithms. In the course of training, the SOA algorithm employs an iterative procedure in which it
searches its operational space while constantly changing its mode of operation within the algorithm of performing search–so called load balancing exploration and exploitation, all for the
purpose of achieving a set of weights that optimally minimises the defined target function, usually expressed in terms of loss or error rates. The SOA’s parameterization with regard to
survival of the adaptively controlled weights attributes it’s context to the dynamic uses of seagull behaviour which are spiral movements, diving towards and targeting prey, which in turn
compounds the optimization efforts via tuning weight to performance contexts. By averting premature convergence and ensuring diversity in the search process, SOA goes a long way dealing with
issues such as local minima which would otherwise leave the model without reaching global optimum. This results in the model being suitable for neural network training which is a non-linear
and high dimensional processes. The model predictive performance approaches accuracy and generalizability levels concomitant to robustness owing to the addition of SOA to weight
optimization, energy conservation and intelligent transportation systems SOA. Also signal processing and other types of applications show these benefits. With SOA integration models adopt a
reliable and effective mechanism for parameter tuning which translates to better performance and minimizes cost of computation. In the observation of Table 6, various algorithms of LSTM,
Deep-CNN, RNN are compared with various parametric measures. Our proposed work of EMD-CNN-SOA produces the lowest error rate compared to other algorithms for the energy demand in electric
vehicles. Proposed work of EMD-CNN-SOA, the error rate of MAE got 0.0592, MSE got 0.1489 and RMSE got 0.101. Table 7 shows that Energy-saving potential of the control strategy under various
target velocity. Table 7 describes Energy and time consumption corresponding to the control strategy obtained by LSTM, Deep CNN, RNN, and EMD-CNN-SOA. Figure shows that computation time.
Figure 10 observes the implementation of various algorithms in the environment of TWC and CRN for the energy conservation of electric vehicles are given, our proposed work of EMD-CNN-SOA
requires minimum time for the energy conservation based on cognitive radio signals in the electric vehicle. Figure 8 presents the accuracy rate of various algorithms. Figure 11, shows that
the accuracy rate of TRC and CRN environment of energy conservation of EV. For the TWC, the accuracy rate of LSTM 66.13%, Deep CNN 78.91%, RNN 83.46% and proposed work of EMD-CNN-SOA 88.23%.
Similarly, for CRN the accuracy rate of LSTM 69.16%, Deep CNN 86.25%, RNN 84.37% and proposed work of EMD-CNN-SOA 92.59%. In the analysis of accuracy rate CRN environment produces the
better accuracy rate of various algorithms. Figure 12 shows the energy consumption of various algorithms in the cognitive radio network environment. The observation of Fig. 13 shows that
energy conservation is required for electric vehicles CRN environment and TWC environment. Cognitive radio network optimized the available spectrum in various frequency bands of 1–6 GHz.
Comparing TWC with CRN overall efficiency of the network and reduce consumption of energy in the CWC environment. The examination of EV energy consumption based on cognitive signals produces
prominent results in the features of accuracy, minimum computation time and minimum error rate. STATISTICAL PERFORMANCE ANALYSIS Originating from the principles of classical statistics, the
p-value was introduced by the efforts of R.A. Fisher and is currently accepted as a recommendation to diminish various reasonably significant uncertainties. The point of interest lay in the
frequency of occurrence of a truth and accordingly the s-p value can be expressed in the manner of S. The concept of the s-p value is mostly based on the concept of a valid and false
reality. In a stable reality, the null hypothesis is always true but once the simple p-value ratio is above S and good we often can speak of the likelihood of a different kind and different
measure of p value of achieving that level The ratio determines the direction. Table 8 shows the statistical performance test. Table 8 shows mean error computation. CROSS VALIDATION In this
research, k-fold cross-validation is utilized so as to enhance the generalizability and consistency of the EMD-CNN-SOA model pertaining to the prediction of energy conservation of electric
vehicles (EVs). Cross-validation enhances the accuracy of a model by determining its performance over untrained data and increasing its reliability. It divides the dataset into several
groups and some data sets are allocated for training and other are allocated for validation of the remaining portions of the set. By iterating over several folders, cross validation
minimizes bias and variance that comes through a single train-test split. The temporal relations between instances to time series data were retained by conducting the splitting in
chronological order. When estimating and assessing a model’s accuracy, cross-validation combines individual evaluations and partial estimates, reducing both overfitting and underfitting
risks. The performance of the model in every fold was subjected to evaluation using MAE, MSE, and RMSE. The fold-wise performance heuristics about the EMD-CNN-SOA model are captured in Table
9. About each fold the MAE, MSE, and RMSE are calculated showing the precision and accuracy of the model. In Table 10 the mean and the standard deviation for each of the folds is reported:
The analysis presented in Tables 8, 9, and 10 should be regarded as grouped as it relates to the verification of the efficacy of the EMD-CNN-SOA model, its differences with other models, and
its validation through cross validation. Table 8 gives descriptive statistics of measures of accuracy performance for the different models in this case expressed by the MAE metric and
offers some insight into 95% confidence intervals (CI), p-value, and effect size. From the results, it can be seen that the proposed EMD-CNN-SOA model yields the widest range of MAE (0.0642
± 0.002) with an interval of the level of accuracy [0.063, 0.065] suggesting a level of reliability. EMD-CNN-SOA model has outscored significantly LSTM, Deep-CNN, and RNN with improvements
of p-values less than 0.01 and Effect sizes of between 0.5 and 1.5 ensuring its reliability. The results derived from fold cross-validation for the EMD-CNN-SOA model summarized in Table 9
are those statistically derived across the five folds on some relevant feature statistics of MAE, MSE, and RMSE. The mean MAE is between 0.06302 and 0.06618 while for MSE the mean ranges
from 0.15132 to 0.15509 and RMSE’s highest and lowest mean are between 0.10164 and 0.10445. These minimal changes across folds bear testimony to the capacity of the model to predict
accurately the energy demand as the differences are quite inconsequential. In the case of Table 10, it summarizes the results of cross-validation means and standard deviation for every
metric. Mean absolute error MAE had values of 0.0644 ± 0.00114, mean squared error MSE had values of 0.153 ± 0.001581 and root mean square error RMSE recorded 0.1028 ± 0.001304. These
metrics illustrate the dependability and predictability of the EMD-CNN-SOA model given the small standard errors. The efficiency of the baseline models is discussed in below Table 11. The
proposed model exceeds LSTM by 33.42%, Deep-CNN by 11.81%, and RNN by 5.71% in accuracy. The proposed Model is 30% faster compared to LSTM, 22.83% compared to Deep-CNN, and 2% faster
compared to RNN. The Proposed Model’s MSE is lower than LSTM by 44.95%, Deep CNN by 17.42%, and RNN by 22.48%, and thus the prediction accuracy is better. The time complexity for training
the data in the proposed model is compared with baseline models in Fig. 14 below. The LSTM model took 136 s to train the model, Deep CNN models took 124 s and RNN took 105 s. Compared to
all, our proposed model took 96 s which is computationally less. RNN and EMD-CNN-SOA have obtained less training time. Further, floating point operations (FLOP) are calculated by computing
the number of input neurons, number of output neurons, number of neurons per layer, number of operations per neuron, and kernel operations. The lower FLOP means, the model consumes low power
and low computational cost. In this work baseline models, LSTM obtains 2.5 billion, deep CNN obtains 3.8 billion and RNN obtains 1.9 billion. The proposed model EMD-CNN-SOA obtains 2.2
billion. This shows proposed computational complexity is efficient when compared to other models. Though RNN is 1.9 billion FLOP, the accuracy of the model is not as efficient than the
proposed EMD-CNN-SOA. Figure 14 shows the graph for efficiency analysis comparison of baseline models. DISCUSSION The CRN with EV systems has promising potential that can reshape the smart
transportation industry. These networks address the energy demand diversion and route planning and communication of the EV with the charging stations. CRNs may be used for smartly shifting
the demand of energy in urban areas to energize a great number of EVs at the Electric Vehicle Charging Network (EVCN) and stations simultaneously. In addition, CRN assists in saving energy
and improves the safety of mobility by enabling vehicles to be updated more efficiently regarding traffic situations and environmental problems. CRN allows routing planning and scheduling of
charging times for public vehicles such as bus fleets that are battery-powered. In the context of transportation systems for EVs, the aforementioned functionalities have some limitations
particularly: compatibility issues among different communication systems and their high cost, limited network accessibility in regions with low population density, and the cost and technical
difficulties of building and installing CR infrastructure. Also, rapid change in location and keeping communication reliable, considering the limited amount of frequency to be utilized,
makes meeting increased communication demand a top priority. Concerns about security issues arising from cyberattacks or infringing on people’s privacy also are in need of solutions. These
are very important problems that must be addressed in able to enable Sanders collaborated targeted controller’s deployment or summerized the possibilities of “EV” systems performance
improvement for making it more sustainable and efficient transport system. Although CRNs can adaptively use available frequencies in the communication network, ensuring reliable and
uninterrupted communication in congested spectrums still remain challenge. CRN enables network requires continuous resource allocation. CONCLUSION This paper presented a cognitive radio
network environment in electric vehicles of energy conservation by using EMD-CNN-SOA. The process of EMD is decomposed into sub-series of data and extracts IMFs and residue of the
information. This decomposed input signal information is transferred into the input of the CNN model. This CNN model predicts the energy demand of electric vehicles to get the most accurate
prediction of energy demand by optimizing the weight value of the CNN model using the seagull optimization algorithm. Deep learning based energy forecasting with integration on cognitive
radio network enhances the prediction performance in time. This makes our system more accurate and efficient in achieving accurate prediction of energy demand. This infer in reducing energy
wastage and enhances the conservation rate. The accuracy rate for the energy conservation in electric vehicles of TWC, LSTM 66.13%, Deep CNN 78.91%, RNN 83.46%, and proposed work of
EMD-CNN-SOA 88.23%. Similarly, for CRN the accuracy rate of LSTM is 69.16%, Deep CNN is 86.25%, RNN is 84.37%, and the proposed work of EMD-CNN-SOA is 92.59%. In the future, this work may
extend with another optimization algorithm of deep-based models. DATA AVAILABILITY The data that support the findings of this research are available from the corresponding author upon
reasonable request. REFERENCES * Shanmuganathan, J., Victoire, A. A., Balraj, G. & Victoire, A. Deep learning LSTM recurrent neural network model for prediction of electric vehicle
charging demand. _Sustainability_ 14, 10207 (2022). Article MATH Google Scholar * Hossain, M. A. et al. Comprehensive survey of machine learning approaches in cognitive radio-based
vehicular ad hoc networks. _Digit. Object Identif._ https://doi.org/10.1109/ACCESS.2020.2989870 (2020). Article Google Scholar * Liu, H., Zhang, Y., Zhang, Y. & Zhang, K. Evaluating
impacts of intelligent transit priority on intersection energy and emissions. _Transp. Res. Part D Transp. Environ._ 86, 102416 (2020). Article MATH Google Scholar * Li, P., Jiang, M.,
Zhang, Y. & Zhang, Y. Cooperative optimization of bus service and charging schedules for a fast-charging battery electric bus network. _IEEE Trans. Intell. Transp. Syst._ 24(5),
5362–5375 (2023). Article MATH Google Scholar * Zhang, Y., Deng, X., Zhang, Y. & Zhang, Y. Generation of sub-item load profiles for public buildings based on the conditional
generative adversarial network and moving average method. _Energy Build._ 268, 112185 (2022). Article MATH Google Scholar * Liu, T. et al. Drivingconditions-driven energy management
strategies for hybrid electricvehicles: A review. _Renew. Sustain. Energy Rev._ 151, 111521 (2021). Article Google Scholar * Modia, S., Bhattacharya, J. & Basak, P. Estimation of
energy consumption of electric vehicles using Deep Convolutional Neural Network to reduce driver’s range anxiety. (2019). * Valladolid, J. D. et al. A novel energy-efficiency optimization
approach based on driving patterns styles and experimental tests for electric vehicles. _Electronics_ 10, 1199 (2021). Article Google Scholar * Guo, Q., Zhao, Z., Shen, P., Zhan, X. &
Li, J. Adaptive optimal control based on driving style recognition for plug-in hybrid electricvehicle. _Energy_ 186, 115824 (2019). Article MATH Google Scholar * Eddine, M. D. & Shen,
Y. A deep learning-based approach for predicting the demand of electric vehicle charge. _J. Supercomput._ 78, 14072–14095 (2022). Article MATH Google Scholar * Shi, J., Liu, N., Huang,
Y. & Ma, L. An edge computing-oriented net power forecasting for PV-assisted charging station: Model complexity and forecasting accuracy trade-off. _Appl. Energy_ 310, 118456 (2022).
Article Google Scholar * Liu, Y., Liu, W., Gao, S., Wang, Y. & Shi, Q. Fast charging demand forecasting based on the intelligent sensing system of dynamic vehicle under
EVs-traffic-distribution coupling. _Energy Rep._ 8, 1218–1226 (2022). Article MATH Google Scholar * Asensio, E. M., Magallán, G. A., Pérez, L. & De Angelo, C. H. Short-term power
demand prediction for energy management of anelectric vehicle based on batteries and ultra capacitors. _Energy_ 247, 123430 (2022). Article Google Scholar * Zeng, T. et al.
Optimization-oriented adaptive equivalent consumption minimization strategy based on short-term demand power prediction for fuel cell hybrid vehicle. _Energy_ 227, 120305 (2021). Article
Google Scholar * Liu, Q., Dong, S., Yang, Z., Xu, F. & Chen, H. Energy management strategy of hybrid electric vehicles based on driving conditionprediction. _IFAC-Pap._ 54, 265–270
(2021). MATH Google Scholar * Cadete, E., Ding, C., Xie, M., Ahmed, S. & Jin, Y. F. Prediction of electric vehicles charging load using long short-term memorymodel. In _Tran-SET 2021_
52–55 (American Society of Civil Engineers, 2021). * Sun, D., Ou, Q., Yao, X., Gao, S., Wang, Z., Ma, W. & Li, W. Integrated human-machine intelligence for EV charging prediction in 5G
smart grid. EURASIP J. Wirel. Commun. Netw. 139 (2020). * Hannah Jessie Rani, R. & Aruldoss Albert Victoire, T. A hybrid Elman recurrent neural network, group search optimization,
andrefined VMD-based framework for multi-step ahead electricity price forecasting. _Soft Comput._ 23, 8413–8434 (2019). Article MATH Google Scholar * Mao, M., Zhang, S., Chang, L. &
Hatziargyriou, N. D. Schedulable capacity forecasting for electric vehicles based on big dataanalysis. _J. Mod. Power Syst. Clean Energy_ 7, 1651–1662 (2019). Article MATH Google Scholar
* Huang, Z., Zhou, Y., Lin, Y. & Zhao, Y. Resilience evaluation and enhancing for China’s electric vehicle supply chain in the presence of attacks: A complex network analysis approach.
_Comput. Ind. Eng._ 195, 110416 (2024). Article Google Scholar * Huang, T., Yin, H., Yin, X. & Xiao, H. Dynamic node management for energy optimization in cognitive radio systems. _J.
Electr. Comput. Eng._ 2024(1), 7438104 (2024). Article MATH Google Scholar * Zaid, S. A., Albalawi, H., Alatwi, A. M. & Elemary, A. Performance improvement of an electric vehicle
charging station using brain emotional learning-based intelligent control. _Processes_ 12(5), 1014 (2024). Article CAS Google Scholar * Raza, A. et al. Wideband communications through
drone-assisted cognitive radio VANETs using SURF channel selection. _Digit. Commun. Netw._ (2024). * Du, H. & Wang, Y. A double-threshold cooperative spectrum sensing algorithm in the
internet of vehicles. _World Electr. Veh. J._ 15(5), 195 (2024). Article MATH Google Scholar * Ma, K., Yang, J. & Liu, P. Relaying-assisted communications for demand response in smart
grid: Cost modeling, game strategies, and algorithms. _IEEE J. Sel. Areas Commun._ 38(1), 48–60 (2020). Article MATH Google Scholar * Yang, J., Xu, W., Ma, K. & Li, C. A three-stage
multi-energy trading strategy based on P2P trading mode. _IEEE Trans. Sustain. Energy_ 14(1), 233–241 (2023). Article ADS MATH Google Scholar * Yao, Y. et al. Automotive radar
optimization design in a spectrally crowded V2I communication environment. _IEEE Trans. Intell. Transp. Syst._ 24(8), 8253–8263 (2023). Article Google Scholar * Peng, X., Song, S., Zhang,
X., Dong, M. & Ota, K. Task offloading for IoAV under extreme weather conditions using dynamic price driven double broad reinforcement learning. _IEEE Internet Things J._ 11(10),
17021–17033 (2024). Article Google Scholar * Shirkhani, M. et al. A review on microgrid decentralized energy/voltage control structures and methods. _Energy Rep._ 10, 368–380 (2023).
Article Google Scholar * Wang, H. et al. Towards an obstacle detection system for robot obstacle negotiation. _Ind. Robot Int. J. Robot. Res. Appl._ 51(2), 236–245 (2024). Article MATH
Google Scholar * Ding, C. et al. The intelligent traffic flow control system based on 6G and optimized genetic algorithm. _IEEE Trans. Intell. Transp. Syst._ 1–14 (2024). * Liu, K. et al.
On image transformation for partial discharge source identification in vehicle cable terminals of high-speed trains. _High Volt._ 9(5), 1090–1100 (2024). Article MATH Google Scholar *
Liu, Y. & Zhao, Y. A blockchain-enabled framework for vehicular data sensing: Enhancing information freshness. _IEEE Trans. Veh. Technol._ 73(11), 17416–17429 (2024). Article Google
Scholar * Zhou, Z. et al. Short-term lateral behavior reasoning for target vehicles considering driver preview characteristic. _IEEE Trans. Intell. Transp. Syst._ 23(8), 11801–11810 (2022).
Article Google Scholar * Liu, X. et al. Trajectory prediction of preceding target vehicles based on lane crossing and final points generation model considering driving styles. _IEEE
Trans. Veh. Technol._ 70(9), 8720–8730 (2021). Article Google Scholar * Duan, Y., Zhao, Y. & Hu, J. An initialization-free distributed algorithm for dynamic economic dispatch problems
in microgrid: Modeling, optimization and analysis. _Sustain. Energy Grids Netw._ 34, 101004 (2023). Article MATH Google Scholar * Luo, J., Wang, G., Li, G. & Pesce, G. Transport
infrastructure connectivity and conflict resolution: A machine learning analysis. _Neural Comput. Appl._ 34(9), 6585–6601 (2022). Article MATH Google Scholar * Chen, J. et al. A flow
feedback traffic prediction based on visual quantified features. _IEEE Trans. Intell. Transp. Syst._ 24(9), 10067–10075 (2023). Article ADS MATH Google Scholar * Chen, J. et al.
Disparity-based multiscale fusion network for transportation detection. _IEEE Trans. Intell. Transp. Syst._ 23(10), 18855–18863 (2022). Article MATH Google Scholar * Chen, J., Wang, Q.,
Cheng, H. H., Peng, W. & Xu, W. A review of vision-based traffic semantic understanding in ITSs. _IEEE Trans. Intell. Transp. Syst._ 23(11), 19954–19979 (2022). Article Google Scholar
* Rong, Y. et al. Du-Bus: A realtime bus waiting time estimation system based on multi-source data. _IEEE Trans. Intell. Transp. Syst._ 23(12), 24524–24539 (2022). Article MATH Google
Scholar * Selvarajan, S. A comprehensive study on modern optimization techniques for engineering applications. _Artif. Intell. Rev._ 57(8), 194 (2024). Article MATH Google Scholar *
Madaram, V., Biswas, P. K., Sain, C., Thanikanti, S. B. & Selvarajan, S. Optimal electric vehicle charge scheduling algorithm using war strategy optimization approach. _Sci. Rep._ 14(1),
21795 (2024). Article CAS PubMed PubMed Central Google Scholar * https://www.nrel.gov/ * Alqahtani, A. S. et al. Prophetic energy assessment with smart implements in hydroelectricity
entities using artificial intelligence algorithm. _Int. Trans. Electr. Energy Syst._ 2022(1), 2376353 (2022). Google Scholar * Selvarajan, S., Manoharan, H., Khadidos, A. O. & Khadidos,
A. O. Testing of emerging wireless sensor networks using radar signals with machine learning algorithms. _IEEE J. Sel. Areas Sens_. (2024). * Sun, G. et al. Cost-efficient service function
chain orchestration for low-latency applications in nfv networks. _IEEE Syst. J._ 13(4), 3877–3888 (2019). Article ADS Google Scholar * Sun, G. et al. V2V routing in a Vanet based on the
autoregressive integrated moving average model. _IEEE Trans. Veh. Technol._ 68(1), 908–922 (2019). Article MATH Google Scholar * Sun, G. et al. Bus-trajectory-based street-centric routing
for message delivery in urban vehicular ad hoc networks. _IEEE Trans. Veh. Technol._ 67(8), 7550–7563 (2018). Article Google Scholar * Han, L., Jiao, X. & Zhang, Z. Recurrent neural
network-based adaptive energy management control strategy of plug-in hybrid electric vehicles considering battery aging. _Energies_ 13(202), 2020 (2020). MATH Google Scholar Download
references FUNDING No funding was received to assist with the preparation of this manuscript. AUTHOR INFORMATION AUTHORS AND AFFILIATIONS * Sri Eshwar College of Engineering, Coimbatore,
India V. Niranjani & Anandakumar Haldorai Authors * V. Niranjani View author publications You can also search for this author inPubMed Google Scholar * Anandakumar Haldorai View author
publications You can also search for this author inPubMed Google Scholar CONTRIBUTIONS Conceptualization, N.V. and A.H.; methodology, N.V. and A.H.; software, N.V. and A.H; validation, N.V.
and A.H.; formal analysis, writing—original draft preparation, N.V.; writing—review and editing, N.V. and A.H.; All authors have read and agreed to the published version of the manuscript.
CORRESPONDING AUTHOR Correspondence to Anandakumar Haldorai. ETHICS DECLARATIONS COMPETING INTERESTS The authors declare no competing interests. ADDITIONAL INFORMATION PUBLISHER’S NOTE
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations. RIGHTS AND PERMISSIONS OPEN ACCESS This article is licensed under a
Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as
long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not
have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s
Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not
permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit
http://creativecommons.org/licenses/by-nc-nd/4.0/. Reprints and permissions ABOUT THIS ARTICLE CITE THIS ARTICLE Niranjani, V., Haldorai, A. Improved deep learning model for accurate energy
demand prediction and conservation in electric vehicles integrated with cognitive radio networks. _Sci Rep_ 15, 11621 (2025). https://doi.org/10.1038/s41598-025-94650-6 Download citation *
Received: 07 October 2024 * Accepted: 17 March 2025 * Published: 04 April 2025 * DOI: https://doi.org/10.1038/s41598-025-94650-6 SHARE THIS ARTICLE Anyone you share the following link with
will be able to read this content: Get shareable link Sorry, a shareable link is not currently available for this article. Copy to clipboard Provided by the Springer Nature SharedIt
content-sharing initiative KEYWORDS * Electric vehicle * Seagull * EMD * Energy conservation * Smart transport * Cognitive radio








