- Select a language for the TTS:
- UK English Female
- UK English Male
- US English Female
- US English Male
- Australian Female
- Australian Male
- Language selected: (auto detect) - EN
Play all audios:
Large-area stretchable electronics are critical for progress in wearable computing, soft robotics and inflatable structures. Recent efforts have focused on engineering electronics from soft
materials—elastomers, polyelectrolyte gels and liquid metal. While these materials enable elastic compliance and deformability, they are vulnerable to tearing, puncture and other mechanical
damage modes that cause electrical failure. Here, we introduce a material architecture for soft and highly deformable circuit interconnects that are electromechanically stable under typical
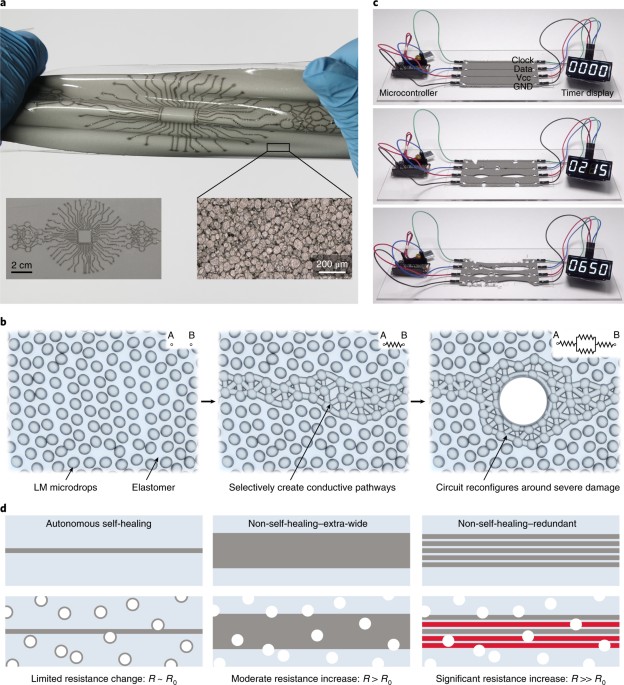
loading conditions, while exhibiting uncompromising resilience to mechanical damage. The material is composed of liquid metal droplets suspended in a soft elastomer; when damaged, the
droplets rupture to form new connections with neighbours and re-route electrical signals without interruption. Since self-healing occurs spontaneously, these materials do not require manual
repair or external heat. We demonstrate this unprecedented electronic robustness in a self-repairing digital counter and self-healing soft robotic quadruped that continue to function after
significant damage.
The authors acknowledge support from the NASA Early Career Faculty Award (NNX14AO49G; Research Collaborator: B. Bluethmann) and AFOSR Multidisciplinary University Research Initiative
(FA9550-18-1-0566; Program Manager: K. Goretta). M.D.B. also acknowledges support from Iowa State University start up funds. Sensor and mechanical characterization was performed on equipment
supported through an Office of Naval Research (ONR) Defense University Research Instrumentation Program (DURIP) (N00014140778; Bioinspired Autonomous Systems; Program Manager: T. McKenna).
These authors contributed equally: Eric J. Markvicka, Michael D. Bartlett.
Integrated Soft Materials Lab, Carnegie Mellon University, Pittsburgh, PA, USA
Robotics Institute, Carnegie Mellon University, Pittsburgh, PA, USA
Material Science & Engineering, Iowa State University, Ames, IA, USA
Mechanical Engineering, Carnegie Mellon University, Pittsburgh, PA, USA
E.J.M., M.D.B., X.H. and C.M. designed the research; E.J.M., M.D.B. and X.H. performed the research; E.J.M., M.D.B., X.H. and C.M. analysed the data; E.J.M., M.D.B. and C.M. wrote the paper.
Publisher’s note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
1 supplementary note with 1 reference, Supplementary Figures 1–11
Electrical activation of LM composite. The video illustrates the electrical activation of the LM composite using a 2D plotter and the ability to pattern geometrically intricate designs
Elapsed time counter with autonomously self-healing electronics. The video illustrates the ability of the composite to autonomously self-heal under extreme damage without manual
intervention, use of external energy sources, or redundant electronics. A complementary illustration is shown with traditional electrical wiring, which immediately fails after damage
Elapsed time counter with selectively patterned autonomously self-healing electronics. The video demonstrates the ability of the composite to be selectively patterned and autonomously
self-heal under extreme damage without unintended electrical shorting, without manual intervention, use of external energy sources, or redundant electronics
Electrical stability of the autonomously self-healing electronics under normal walking conditions. The video demonstrates the ability of the composite to undergo normal walking conditions
for up to 31 steps with 10 footwear variations
An autonomously self-healing soft robot. The video demonstrates the ability to use the self-healing composite for soft robots that require on-board circuitry that are resistant to damage and
can support large bursts of electrical power
Anyone you share the following link with will be able to read this content:







