- Select a language for the TTS:
- UK English Female
- UK English Male
- US English Female
- US English Male
- Australian Female
- Australian Male
- Language selected: (auto detect) - EN
Play all audios:
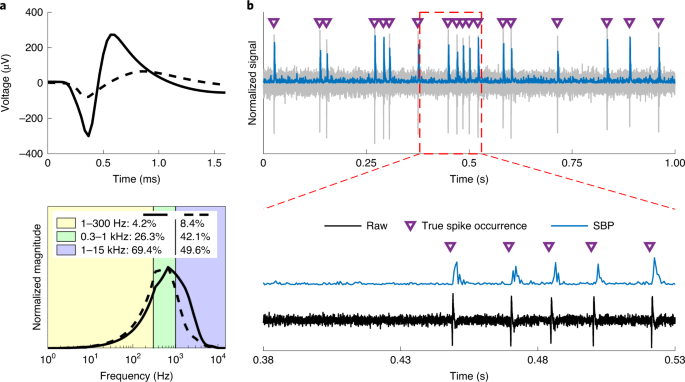
ABSTRACT The large power requirement of current brain–machine interfaces is a major hindrance to their clinical translation. In basic behavioural tasks, the downsampled magnitude of the
300–1,000 Hz band of spiking activity can predict movement similarly to the threshold crossing rate (TCR) at 30 kilo-samples per second. However, the relationship between such a spiking-band
power (SBP) and neural activity remains unclear, as does the capability of using the SBP to decode complicated behaviour. By using simulations of recordings of neural activity, here we show
that the SBP is dominated by local single-unit spikes with spatial specificity comparable to or better than that of the TCR, and that the SBP correlates better with the firing rates of
lower signal-to-noise-ratio units than the TCR. With non-human primates, in an online task involving the one-dimensional decoding of the movement of finger groups and in an offline
two-dimensional cursor-control task, the SBP performed equally well or better than the TCR. The SBP may enhance the decoding performance of neural interfaces while enabling substantial cuts
in power consumption. Access through your institution Buy or subscribe This is a preview of subscription content, access via your institution ACCESS OPTIONS Access through your institution
Access Nature and 54 other Nature Portfolio journals Get Nature+, our best-value online-access subscription $32.99 / 30 days cancel any time Learn more Subscribe to this journal Receive 12
digital issues and online access to articles $119.00 per year only $9.92 per issue Learn more Buy this article * Purchase on SpringerLink * Instant access to full article PDF Buy now Prices
may be subject to local taxes which are calculated during checkout ADDITIONAL ACCESS OPTIONS: * Log in * Learn about institutional subscriptions * Read our FAQs * Contact customer support
SIMILAR CONTENT BEING VIEWED BY OTHERS BRAIN-INSPIRED SPIKING NEURAL NETWORKS FOR DECODING AND UNDERSTANDING MUSCLE ACTIVITY AND KINEMATICS FROM ELECTROENCEPHALOGRAPHY SIGNALS DURING HAND
MOVEMENTS Article Open access 28 January 2021 INFERRING ENTIRE SPIKING ACTIVITY FROM LOCAL FIELD POTENTIALS Article Open access 24 September 2021 GRASP-SQUEEZE ADAPTATION TO CHANGES IN
OBJECT COMPLIANCE LEADS TO DYNAMIC BETA-BAND COMMUNICATION BETWEEN PRIMARY SOMATOSENSORY AND MOTOR CORTICES Article Open access 26 April 2022 DATA AVAILABILITY The main data supporting the
results in this study are available within the paper and its Supplementary Information. The raw and analysed datasets generated during the study are too large to be publicly shared, yet they
are available for research purposes from the corresponding authors on reasonable request. CODE AVAILABILITY The code used in this study is available from the corresponding author upon
reasonable request. REFERENCES * Collinger, J. L. et al. High-performance neuroprosthetic control by an individual with tetraplegia. _Lancet_ 381, 557–564 (2013). PubMed PubMed Central
Google Scholar * Hochberg, L. R. et al. Reach and grasp by people with tetraplegia using a neurally controlled robotic arm. _Nature_ 485, 372–375 (2012). CAS PubMed PubMed Central Google
Scholar * Velliste, M., Perel, S., Spalding, M. C., Whitford, A. S. & Schwartz, A. B. Cortical control of a prosthetic arm for self-feeding. _Nature_ 453, 1098–1101 (2008). CAS PubMed
Google Scholar * Gilja, V. et al. Clinical translation of a high-performance neural prosthesis. _Nat. Med._ 21, 1142–1145 (2015). CAS PubMed PubMed Central Google Scholar * Rizk, M.
et al. A fully implantable 96-channel neural data acquisition system. _J. Neural Eng._ 6, 026002 (2009). PubMed PubMed Central Google Scholar * Borton, D. A., Yin, M., Aceros, J. &
Nurmikko, A. An implantable wireless neural interface for recording cortical circuit dynamics in moving primates. _J. Neural Eng._ 10, 026010 (2013). PubMed PubMed Central Google Scholar
* Harrison, R. R. et al. A low-power integrated circuit for a wireless 100-electrode neural recording system. _IEEE J. Solid State Circuits_ 42, 123–133 (2007). Google Scholar * Chae, M. et
al. A 128-channel 6 mW wireless neural recording IC with on-the-fly spike sorting and UWB Tansmitter. _IEEE Int. Solid State Circuits Conf._ 51, 146–148 (2008). Google Scholar * Aziz, J.
N. et al. 256-channel neural recording and delta compression microsystem with 3D electrodes. _IEEE J. Solid State Circuits_ 44, 995–1005 (2009). Google Scholar * Shahrokhi, F., Abdelhalim,
K., Serletis, D., Carlen, P. L. & Genov, R. The 128-channel fully differential digital integrated neural recording and stimulation interface. _IEEE Trans. Biomed. Circuits Syst._ 4,
149–161 (2010). PubMed Google Scholar * Wattanapanitch, W. & Sarpeshkar, R. A low-power 32-channel digitally programmable neural recording integrated circuit. _IEEE Trans. Biomed.
Circuits Syst._ 5, 592–602 (2011). CAS PubMed Google Scholar * Gao, H. et al. HermesE: a 96-channel full data rate direct neural interface in 0.13 μm CMOS. _IEEE J. Solid State Circuits_
47, 1043–1055 (2012). Google Scholar * Biederman, W. et al. A fully-integrated, miniaturized (0.125 mm2) 10.5 μW wireless neural sensor. _IEEE J. Solid State Circuits_ 48, 960–970 (2013).
Google Scholar * Abdelhalim, K., Kokarovtseva, L., Velazquez, J. L. P. & Genov, R. 915-MHz FSK/OOK wireless neural recording SoC with 64 mixed-signal FIR filters. _IEEE J. Solid State
Circuits_ 48, 2478–2493 (2013). Google Scholar * Karkare, V., Gibson, S. & Markovic, D. A 75-μW, 16-channel neural spike-sorting processor with unsupervised clustering. _IEEE J. Solid
State Circuits_ 48, 2230–2238 (2013). Google Scholar * Borna, A. & Najafi, K. A low power light weight wireless multichannel microsystem for reliable neural recording. _IEEE J. Solid
State Circuits_ 49, 439–451 (2014). Google Scholar * Limnuson, K., Lu, H., Chiel, H. J. & Mohseni, P. A bidirectional neural interface SoC with an integrated spike recorder,
microstimulator, and low-power processor for real-time stimulus artifact rejection. _Analog Integr. Circuits Signal Process._ 82, 457–470 (2015). Google Scholar * Park, S. Y., Cho, J., Na,
K. & Yoon, E. Modular 128-channel _Δ_−_Δ__Σ_ analog front-end architecture using spectrum equalization scheme for 1024-channel 3-D neural recording microsystems. _IEEE J. Solid State
Circuits_ 53, 501–514 (2018). Google Scholar * Harrison, R. R. et al. Wireless neural recording with single low-power integrated circuit. _IEEE Trans. Neural Syst. Rehabilitation Eng._ 17,
322–329 (2009). Google Scholar * Harrison, R. R. & Charles, C. A low-power low-noise CMOS amplifier for neural recording applications. _IEEE J. Solid State Circuits_ 38, 958–965 (2003).
Google Scholar * Seo, D., Carmena, J. M., Rabaey, J. M., Alon, E. & Maharbiz, M. M. Neural dust: an ultrasonic, low power solution for chronic brain–machine interfaces. Preprint at
https://arxiv.org/abs/1307.2196 (2013). * Ethier, C., Oby, E. R., Bauman, M. J. & Miller, L. E. Restoration of grasp following paralysis through brain-controlled stimulation of muscles.
_Nature_ 485, 368–371 (2012). CAS PubMed PubMed Central Google Scholar * Wodlinger, B. et al. Ten-dimensional anthropomorphic arm control in a human brain–machine interface:
difficulties, solutions, and limitations. _J. Neural Eng._ 12, 016011 (2015). CAS PubMed Google Scholar * Capogrosso, M. et al. A brain–spine interface alleviating gait deficits after
spinal cord injury in primates. _Nature_ 539, 284–288 (2016). PubMed PubMed Central Google Scholar * Ajiboye, A. B. et al. Restoration of reaching and grasping movements through
brain-controlled muscle stimulation in a person with tetraplegia: a proof-of-concept demonstration. _Lancet_ 389, 1821–1830 (2017). PubMed PubMed Central Google Scholar * Irwin, Z. T. et
al. Neural control of finger movement via intracortical brain–machine interface. _J. Neural Eng._ 14, 066004 (2017). CAS PubMed PubMed Central Google Scholar * Pandarinath, C. et al.
High performance communication by people with paralysis using an intracortical brain–computer interface. _eLife_ 6, e18554 (2017). PubMed PubMed Central Google Scholar * Shanechi, M. M.
et al. Rapid control and feedback rates enhance neuroprosthetic control. _Nat. Commun._ 8, 13825 (2017). CAS PubMed PubMed Central Google Scholar * Heldman, D. A., Wang, W., Chan, S. S.
& Moran, D. W. Local field potential spectral tuning in motor cortex during reaching. _IEEE Trans. Neural Syst. Rehabilitation Eng._ 14, 180–183 (2006). Google Scholar * Bansal, A. K.,
Vargas-Irwin, C. E., Truccolo, W. & Donoghue, J. P. Relationships among low-frequency local field potentials, spiking activity, and three-dimensional reach and grasp kinematics in
primary motor and ventral premotor cortices. _J. Neurophysiol._ 105, 1603–1619 (2011). PubMed PubMed Central Google Scholar * Mollazadeh, M. et al. Spatiotemporal variation of multiple
neurophysiological signals in the primary motor cortex during dexterous reach-to-grasp movements. _J. Neurosci._ 31, 15531–15543 (2011). CAS PubMed PubMed Central Google Scholar * Stark,
E. & Abeles, M. Predicting movement from multiunit activity. _J. Neurosci._ 27, 8387–8394 (2007). CAS PubMed PubMed Central Google Scholar * Baker, J. et al. Multi-scale recordings
for neuroprosthetic control of finger movements. In _2009_ _Annu. Int. Conf. IEEE Eng. Med. Biol. Soc._ 4573–4577 (IEEE, 2009). * Zhuang, J., Truccolo, W., Vargas-Irwin, C. & Donoghue,
J. P. Decoding 3-D reach and grasp kinematics from high-frequency local field potentials in primate primary motor cortex. _IEEE Trans. Biomed. Eng._ 57, 1774–1784 (2010). PubMed PubMed
Central Google Scholar * Flint, R. D., Ethier, C., Oby, E. R., Miller, L. E. & Slutzky, M. W. Local field potentials allow accurate decoding of muscle activity. _J. Neurophysiol._ 108,
18–24 (2012). PubMed PubMed Central Google Scholar * Flint, R. D., Lindberg, E. W., Jordan, L. R., Miller, L. E. & Slutzky, M. W. Accurate decoding of reaching movements from field
potentials in the absence of spikes. _J. Neural Eng._ 9, 046006 (2012). PubMed PubMed Central Google Scholar * Aggarwal, V., Mollazadeh, M., Davidson, A. G., Schieber, M. H. & Thakor,
N. V. State-based decoding of hand and finger kinematics using neuronal ensemble and LFP activity during dexterous reach-to-grasp movements. _J. Neurophysiol._ 109, 3067–3081 (2013). PubMed
PubMed Central Google Scholar * Perge, J. A. et al. Reliability of directional information in unsorted spikes and local field potentials recorded in human motor cortex. _J. Neural Eng._
11, 046007 (2014). PubMed PubMed Central Google Scholar * Wang, D. et al. Long-term decoding stability of local field potentials from silicon arrays in primate motor cortex during a 2D
center out task. _J. Neural Eng._ 11, 036009 (2014). PubMed Google Scholar * Flint, R. D., Wright, Z. A., Scheid, M. R. & Slutzky, M. W. Long term, stable brain machine interface
performance using local field potentials and multiunit spikes. _J. Neural Eng._ 10, 056005 (2013). PubMed PubMed Central Google Scholar * So, K., Dangi, S., Orsborn, A. L., Gastpar, M. C.
& Carmena, J. M. Subject-specific modulation of local field potential spectral power during brain–machine interface control in primates. _J. Neural Eng._ 11, 026002 (2014). PubMed
Google Scholar * Stavisky, S. D., Kao, J. C., Nuyujukian, P., Ryu, S. I. & Shenoy, K. V. A high performing brain–machine interface driven by low-frequency local field potentials alone
and together with spikes. _J. Neural Eng._ 12, 036009 (2015). PubMed PubMed Central Google Scholar * Milekovic, T. et al. Stable long-term BCI-enabled communication in ALS and locked-in
syndrome using LFP signals. _J. Neurophysiol._ 120, 343–360 (2018). PubMed PubMed Central Google Scholar * Kubánek, J., Miller, K. J., Ojemann, J. G., Wolpaw, J. R. & Schalk, G.
Decoding flexion of individual fingers using electrocorticographic signals in humans. _J. Neural Eng._ 6, 066001 (2009). PubMed PubMed Central Google Scholar * Chao, Z. C., Nagasaka, Y.
& Fujii, N. Long-term asynchronous decoding of arm motion using electrocorticographic signals in monkeys. _Front. Neuroeng._ 3, 1–10 (2010). Google Scholar * Chestek, C. A. et al. Hand
posture classification using electrocorticography signals in the gamma band over human sensorimotor brain areas. _J. Neural Eng._ 10, 026002 (2013). PubMed PubMed Central Google Scholar *
Flint, R., Rosenow, J., Tate, M. & Slutzky, M. Continuous decoding of human grasp kinematics using epidural and subdural signals. _J. Neural Eng._ 14, 016005 (2017). PubMed Google
Scholar * Hotson, G. et al. Individual finger control of a modular prosthetic limb using high-density electrocorticography in a human subject. _J. Neural Eng._ 13, 026017 (2016). PubMed
PubMed Central Google Scholar * Schlag, J. & Balvin, R. Background activity in the cerebral cortex and reticular formation in relation with the electroencephalogram. _Exp. Neurol._ 8,
203–219 (1963). Google Scholar * Irwin, Z. T. et al. Enabling low-power, multi-modal neural interfaces through a common, low-bandwidth feature space. _IEEE Trans. Neural Syst.
Rehabilitation Eng._ 24, 521–531 (2016). Google Scholar * Kaufman, M. T. et al. The roles of monkey premotor neuron classes in movement preparation and execution. _J. Neurophysiol._ 104,
799–809 (2010). PubMed PubMed Central Google Scholar * Kaufman, M. T., Churchland, M. M. & Shenoy, K. V. The roles of monkey M1 neuron classes in movement preparation and execution.
_J. Neurophysiol._ 110, 817–825 (2013). PubMed PubMed Central Google Scholar * Lempka, S. F. et al. Theoretical analysis of intracortical microelectrode recordings. _J. Neural Eng._ 8,
045006 (2011). PubMed PubMed Central Google Scholar * Holt, G. R. & Koch, C. Electrical interactions via the extracellular potential near cell bodies. _J. Comput. Neurosci._ 6,
169–184 (1999). CAS PubMed Google Scholar * Vargas-Irwin, C. E. et al. Decoding complete reach and grasp actions from local primary motor cortex populations. _J. Neurosci._ 30, 9659–9669
(2010). CAS PubMed PubMed Central Google Scholar * Vaskov, A. K. et al. Cortical decoding of individual finger group motions using ReFIT Kalman filter. _Front. Neurosci._ 12, 751 (2018).
PubMed PubMed Central Google Scholar * Kao, J. C., Nuyujukian, P., Ryu, S. I. & Shenoy, K. V. A high-performance neural prosthesis incorporating discrete state selection with hidden
markov models. _IEEE Trans. Biomed. Eng._ 64, 935–945 (2017). PubMed Google Scholar * Barrese, J. C. et al. Failure mode analysis of silicon-based intracortical microelectrode arrays in
non-human primates. _J. Neural Eng._ 10, 066014 (2013). PubMed PubMed Central Google Scholar * Willett, F. R. et al. Feedback control policies employed by people using intracortical
brain–computer interfaces. _J. Neural Eng._ 14, 016001 (2016). PubMed PubMed Central Google Scholar * Jarosiewicz, B. et al. Virtual typing by people with tetraplegia using a
self-calibrating intracortical brain–computer interface. _Sci. Transl. Med._ 7, 313ra179 (2015). PubMed PubMed Central Google Scholar * Novak, P. et al. Localization of the subthalamic
nucleus in Parkinson disease using multiunit activity. _J. Neurol. Sci._ 310, 44–49 (2011). PubMed PubMed Central Google Scholar * Chestek, C. A. et al. Long-term stability of neural
prosthetic control signals from silicon cortical arrays in rhesus macaque motor cortex. _J. Neural Eng._ 8, 045005 (2011). PubMed PubMed Central Google Scholar * Downey, J. E., Schwed,
N., Chase, S. M., Schwartz, A. B. & Collinger, J. L. Intracortical recording stability in human brain–computer interface users. _J. Neural Eng._ 15, 046016 (2018). PubMed Google Scholar
* Yin, M. et al. An externally head-mounted wireless neural recording device for laboratory animal research and possible human clinical use. In _Annu. Int. Conf. IEEE Eng. Med. Biol. Soc._
3109–3114 (IEEE, 2013). * Viventi, J. et al. Flexible, foldable, actively multiplexed, high-density electrode array for mapping brain activity in vivo. _Nat. Neurosci._ 14, 1599–1605
(2011). CAS PubMed PubMed Central Google Scholar * Seo, D. et al. Wireless recording in the peripheral nervous system with ultrasonic neural dust. _Neuron_ 91, 529–539 (2016). CAS
PubMed Google Scholar * Steinmetz, N. A., Koch, C., Harris, K. D. & Carandini, M. Challenges and opportunities for large-scale electrophysiology with Neuropixels probes. _Curr. Opin.
Neurobiol._ 50, 92–100 (2018). CAS PubMed PubMed Central Google Scholar * Lee, S. et al. A 330 μm × 90 μm opto-electronically integrated wireless system-on-chip for recording of neural
activities. In _IEEE Int. Solid State Circuits Conf. (ISSCC)_ 292–294 (IEEE, 2018). * Robinet, S. et al. A low-power 0.7 μV rms 32-channel mixed-signal circuit for ECoG recordings. _IEEE J.
Emerg. Sel. Top. Circuits Syst._ 1, 451–460 (2011). Google Scholar * Mestais, C. S. et al. WIMAGINE: wireless 64-channel ECoG recording implant for long term clinical applications. _IEEE
Trans. Neural Syst. Rehabilitation Eng._ 23, 10–21 (2015). Google Scholar * Johnson, B. C. et al. An implantable 700 μW 64-channel neuromodulation IC for simultaneous recording and
stimulation with rapid artifact recovery. In _Symposium on VLSI Circuits_ C48–C49 (IEEE, 2017). * Patel, P. R. et al. Chronic in vivo stability assessment of carbon fiber microelectrode
arrays. _J. Neural Eng._ 13, 066002 (2016). PubMed PubMed Central Google Scholar * YoshidaKozai, T. D. et al. Ultrasmall implantable composite microelectrodes with bioactive surfaces for
chronic neural interfaces. _Nat. Mater._ 11, 1065–1073 (2012). Google Scholar * Slutzky, M. W. et al. Optimal spacing of surface electrode arrays for brain machine interface applications.
_J. Neural Eng._ 7, 026004 (2010). Google Scholar * Davoodi, R., Urata, C., Hauschild, M., Khachani, M. & Loeb, G. E. Model-based development of neural prostheses for movement. _IEEE
Trans. Biomed. Eng._ 54, 1909–1918 (2007). PubMed Google Scholar * Wahnoun, R., He, J. & HelmsTillery, S. I. Selection and parameterization of cortical neurons for neuroprosthetic
control. _J. Neural Eng._ 3, 162–171 (2006). PubMed Google Scholar * Thompson, D. E. et al. Performance measurement for brain-computer or brain–machine interfaces: a tutorial. _J. Neural
Eng._ 11, 035001 (2014). PubMed PubMed Central Google Scholar * Aggarwal, V. et al. Asynchronous decoding of dexterous finger movements using M1 neurons. _IEEE Trans. Neural Syst.
Rehabilitation Eng._ 16, 3–14 (2008). Google Scholar Download references ACKNOWLEDGEMENTS We thank E. Kennedy for animal and experimental support. We thank G. Rising, A. Yanovich, L.
Burlingame, P. Lester, V. Dunivant, L. Durham, T. Hetrick, H. Noack, D. Renner, M. Bradley, G. Chan, K. Cornelius, C. Hunter, L. Krueger, R. Nichols, B. Pallas, C. Si, A. Skorupski, J. Xu,
J. Yang, M. Risch, M. Wechsler and R. Reeder for expert surgical assistance and veterinary care. We thank B. Davis for administrative assistance. We thank W. L. Gore Inc. for donating
Preclude artificial dura, used as part of some of the chronic electrode array implantation procedures, and S. Ryu for performing array implantation surgeries. This work was supported by NSF
grant no. 1926576, Craig H. Neilsen Foundation project 315108, A. Alfred Taubman Medical Research Institute, NIH grant no. R01GM111293, MCubed project 1482 and NIH grant no. R21EY029452.
S.R.N. was supported by NIH grant no. F31HD098804. A.K.V. was supported by fellowship from the Robotics Graduate Program at University of Michigan. M.S.W. was supported by NIH grant no.
T32NS007222. E.J.W. was supported by NIH grant nos. U01NS094375 and UF1NS107659, and Office of the Director National Institutes of Health OT2OD024907. H.A., T.J., H.-S.K. and D.B. were
supported by MCubed project 1482 and NIH grant no. R21EY029452. P.P.V., A.J.B., C.S.N. and J.C.K. were supported by NSF-GRFP. K.V.S. was supported in part by the following awards: NIH
National Institute of Neurological Disorders and Stroke Transformative Research Award R01NS076460, NIH National Institute of Mental Health Transformative Research Award R01MH09964703, NIH
Director’s Pioneer Award 8DP1HD075623, Defense Advanced Research Projects Agency (DARPA) Biological Technology Office (BTO) ‘REPAIR’ Award N66001-10-C-2010, DARPA BTO ‘NeuroFAST’ Award
W911NF-14-2-0013, Simons Foundation Collaboration on the Global Brain award 543045, the Office of Naval Research W911NF-14-2-0013 and the Howard Hughes Medical Institute. P.G.P. was
supported by NSF grant no. 1926576, A. Alfred Taubman Medical Research Institute and NIH grant no. R01GM111293. C.A.C. was supported by NSF grant no. 1926576, Craig H. Neilsen Foundation
project 315108, NIH grant nos. R01GM111293 and R21EY029452, and MCubed project 1482. AUTHOR INFORMATION AUTHORS AND AFFILIATIONS * Department of Biomedical Engineering, University of
Michigan, Ann Arbor, MI, USA Samuel R. Nason, Matthew S. Willsey, Elissa J. Welle, Philip P. Vu, Autumn J. Bullard, Chrono S. Nu, Parag G. Patil & Cynthia A. Chestek * Robotics Graduate
Program, University of Michigan, Ann Arbor, MI, USA Alex K. Vaskov & Cynthia A. Chestek * Department of Neurosurgery, University of Michigan Medical School, Ann Arbor, MI, USA Matthew S.
Willsey & Parag G. Patil * Department of Electrical Engineering and Computer Science, University of Michigan, Ann Arbor, MI, USA Hyochan An, Taekwang Jang, Hun-Seok Kim, David Blaauw
& Cynthia A. Chestek * Department of Electrical and Computer Engineering, University of California, Los Angeles, Los Angeles, CA, USA Jonathan C. Kao * Neurosciences Program, University
of California, Los Angeles, Los Angeles, CA, USA Jonathan C. Kao * Department of Electrical Engineering, Stanford University, Stanford, CA, USA Krishna V. Shenoy * Department of
Bioengineering, Stanford University, Stanford, CA, USA Krishna V. Shenoy * Department of Neurobiology, Stanford University, Stanford, CA, USA Krishna V. Shenoy * The Bio-X Program, Stanford
University, Stanford, CA, USA Krishna V. Shenoy * Wu Tsai Neuroscience Institute, Stanford University, Stanford, CA, USA Krishna V. Shenoy * Howard Hughes Medical Institute, Stanford
University, Stanford, CA, USA Krishna V. Shenoy * Department of Information Technology and Electrical Engineering, ETH Zürich, Zürich, Switzerland Taekwang Jang * Department of Neurology,
University of Michigan Medical School, Ann Arbor, MI, USA Parag G. Patil * Neuroscience Graduate Program, University of Michigan, Ann Arbor, MI, USA Parag G. Patil & Cynthia A. Chestek
Authors * Samuel R. Nason View author publications You can also search for this author inPubMed Google Scholar * Alex K. Vaskov View author publications You can also search for this author
inPubMed Google Scholar * Matthew S. Willsey View author publications You can also search for this author inPubMed Google Scholar * Elissa J. Welle View author publications You can also
search for this author inPubMed Google Scholar * Hyochan An View author publications You can also search for this author inPubMed Google Scholar * Philip P. Vu View author publications You
can also search for this author inPubMed Google Scholar * Autumn J. Bullard View author publications You can also search for this author inPubMed Google Scholar * Chrono S. Nu View author
publications You can also search for this author inPubMed Google Scholar * Jonathan C. Kao View author publications You can also search for this author inPubMed Google Scholar * Krishna V.
Shenoy View author publications You can also search for this author inPubMed Google Scholar * Taekwang Jang View author publications You can also search for this author inPubMed Google
Scholar * Hun-Seok Kim View author publications You can also search for this author inPubMed Google Scholar * David Blaauw View author publications You can also search for this author
inPubMed Google Scholar * Parag G. Patil View author publications You can also search for this author inPubMed Google Scholar * Cynthia A. Chestek View author publications You can also
search for this author inPubMed Google Scholar CONTRIBUTIONS M.S.W., K.V.S., P.G.P. and C.A.C. supervised this work and conducted non-human primate surgeries. H.A., T.J., H.-S.K. and D.B.
designed and estimated power consumption of the integrated circuits and wrote the relevant text. J.C.K. and K.V.S. conducted and supplied two-dimensional arm reaching experiments and data.
A.K.V., P.P.V., A.J.B. and C.S.N. assisted with non-human primate experiments and simulation programming. E.J.W. conducted rat experiments. S.R.N. programmed and executed all simulations,
decoding experiments and data analysis, and wrote the manuscript. All authors reviewed and modified the manuscript. CORRESPONDING AUTHOR Correspondence to Cynthia A. Chestek. ETHICS
DECLARATIONS COMPETING INTERESTS K.V.S. is a consultant for Neuralink Corp. and is on the scientific advisory board for CTRL-Labs Inc., MIND-X Inc., Inscopix Inc. and Heal Inc. These
entities did not provide support for this work. ADDITIONAL INFORMATION PUBLISHER’S NOTE Springer Nature remains neutral with regard to jurisdictional claims in published maps and
institutional affiliations. SUPPLEMENTARY INFORMATION SUPPLEMENTARY INFORMATION Supplementary methods and figures. REPORTING SUMMARY SUPPLEMENTARY VIDEO 1 Index-finger control in monkey W.
SUPPLEMENTARY VIDEO 2 Control of the middle/ring/small finger in monkey N. RIGHTS AND PERMISSIONS Reprints and permissions ABOUT THIS ARTICLE CITE THIS ARTICLE Nason, S.R., Vaskov, A.K.,
Willsey, M.S. _et al._ A low-power band of neuronal spiking activity dominated by local single units improves the performance of brain–machine interfaces. _Nat Biomed Eng_ 4, 973–983 (2020).
https://doi.org/10.1038/s41551-020-0591-0 Download citation * Received: 31 October 2018 * Accepted: 24 June 2020 * Published: 27 July 2020 * Issue Date: October 2020 * DOI:
https://doi.org/10.1038/s41551-020-0591-0 SHARE THIS ARTICLE Anyone you share the following link with will be able to read this content: Get shareable link Sorry, a shareable link is not
currently available for this article. Copy to clipboard Provided by the Springer Nature SharedIt content-sharing initiative





